
Konferenz Automatisiertes Fahren 2022
In der vorletzten Woche hat die Konferenz Automatisiertes Fahren 2022 stattgefunden.
Der RST war mit einem Beitrag zur interpretierbaren Approximation…

Call for Paper für den 17. DortmunderAutoTag
Am 08. September 2022 wird die erfolgreiche Veranstaltungsreihe des DortmunderAutoTages fortgesetzt.
Diese Fachtagung, die bereits zum siebzehnten Mal…
Registrieren Sie sich jetzt für die Fachtagung VDI Mechatronik 2022
Registrieren Sie sich jetzt für die spannende Fachtagung VDI Mechatronik 2022 . Das interessante und abwechslungsreiche Programm der Fachtagung VDI…

Neues kinematisches differenzielles globales Satellitennavigationssystem in Echtzeit
Wir haben unser Testfahrzeug kürzlich mit einem neuen kinematischen Echtzeit-Differenzial-Satellitennavigationssystem (RTK-DGNSS) aufgerüstet.
Das…

Informationsvideo zum internationalen Studiengang Automatition & Robotics
Das Informationsvideo zum internationalen Studiengang Automatition & Robotics entstand unter Mitwirkung des Lehrstuhls RST.

Best Paper Award at NeurIPS Workshop
Our contribution "UMBRELLA: Uncertainty-Aware Model-Based Offline Reinforcement Learning Leveraging Planning" achieved the best paper award at the…

Projektwebseite zum Forschungsprojekt KISSaF ist online
Beim automatisierten Fahren des SAE-Levels 3 muss die sichere Fahrzeugführung bis zur Übernahme der Fahraufgabe durch den Fahrer gewährleistet…

Traditionelles Weihnachtsvideo
Wie schon in den vergangenen Jahren präsentiert der Lehrstuhl RST auch 2021 wieder ein neues Weihnachtsvideo.
Wir wünschen auf diesem Wege allen ein…

Deep Learning Cluster wird in Betrieb genommen
Unser Grafikcluster für den Bereich Deep Learning nimmt den Betrieb auf.
Das Cluster verfügt über vier NVIDIA GeForce RTX 3090 Grafikkarten mit je 24…

Neues Forschungsprojekt DEmandäR
Datenbasierte Empfehlungen für das automatisierte Fahren in der ländlichen Region
Ein ÖPNV mit automatisierten Verkehrsmitteln kann zukünftig auf dem…

Efficient Localization on Highways Employing Public HD Maps and Series-Production Sensors
Im Vergleich zu Standard-Navigationskarten enthalten HD-Karten präzise Zusatzinformationen für automatisierte Fahrzeuge. Um diese Informationen nutzen…

Erweiterung des Skelett-Trackings zur Aktivitätserkennung von Fußgängern um eine Objektdetektion zur Filterung fehlerhafter Schätzungen
Fußgänger sind im Straßenverkehr die schwächsten Verkehrsteilnehmer und trotz der technologischen Entwicklung sind die Zahlen der verletzten sowie…

Wizard-of-Oz Studie zum Automatisierten Fahren
Der Lehrstuhl RST hat im Rahmen einer Wizard-of-Oz Studie das Verhalten und die motorischen, sensorischen und physiologischen Reaktionen von Fahrern…

Informationsvideo für internationale Studierende
Heute fanden im Roboterlabor des IRF Dreharbeiten für ein Informationsvideo über den Bachelor Studiengang ET für internationale Studierende statt.
Ein…

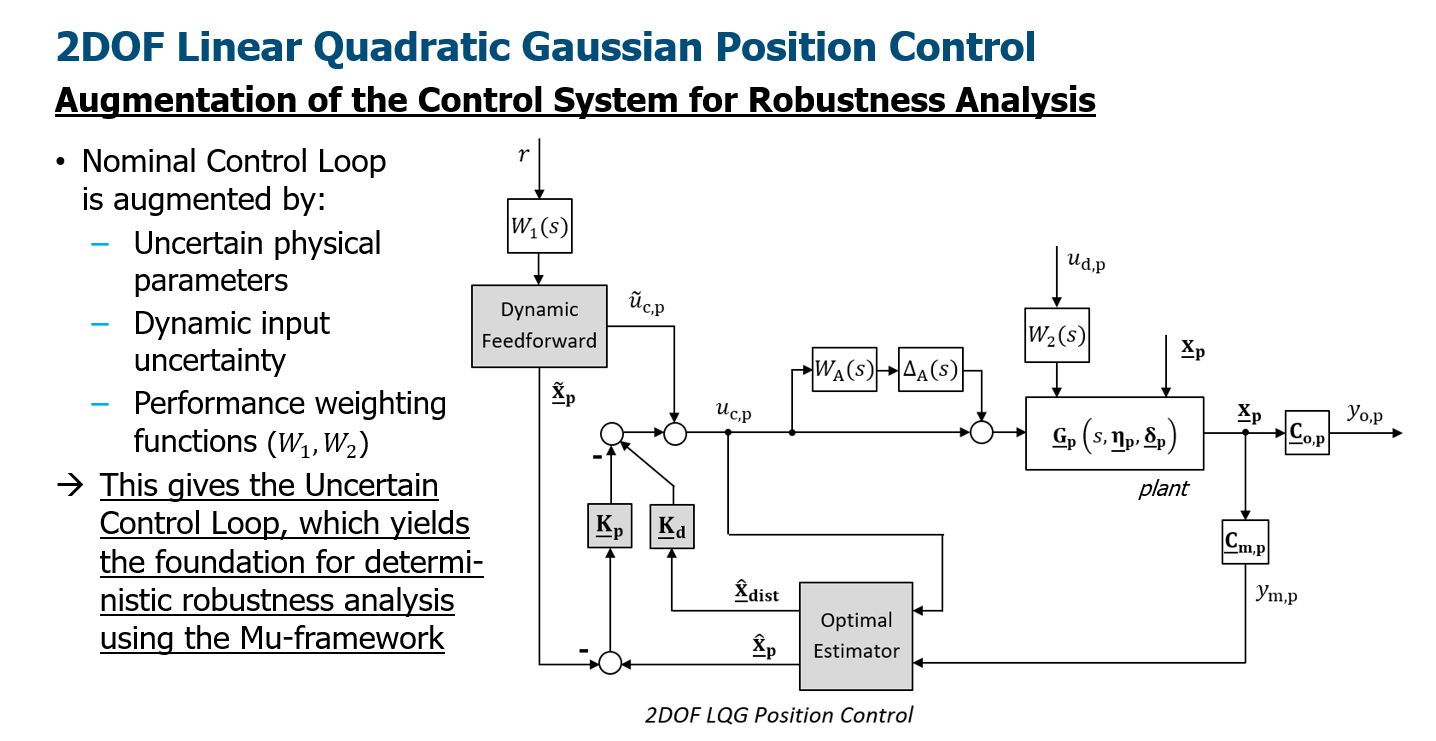
Robustheitsanalyse einer 2-Freiheitsgrade Linear Quadratisch Gaußschen Positionsregelung (2DOF LQG Regelung) des Vorderachsaktuators eines Steer-by-Wire Lenksystems
Die Steer-by-Wire (SbW) Lenkung ist eine Schlüsseltechnologie für hochautomatisiertes Fahren. Für die automatisierte Fahrzeugquerführung ist eine…
Gratulation an Herrn Oeljeklaus
Wir gratulieren Herrn Oeljeklaus zu seiner erfolgreich abgeschlossenen Promotion „An Integrated Approach for Traffic Scene Understanding from…

Vergleich von Real- und Simulationsdaten zur Spurwechselprädiktion in Autobahnszenarien
Um menschliche Fahrer in bestimmten Fahrszenarien durch die Übernahme der Fahraufgabe zu entlasten (SAE Level 2 bis 4) oder vollständig von der…

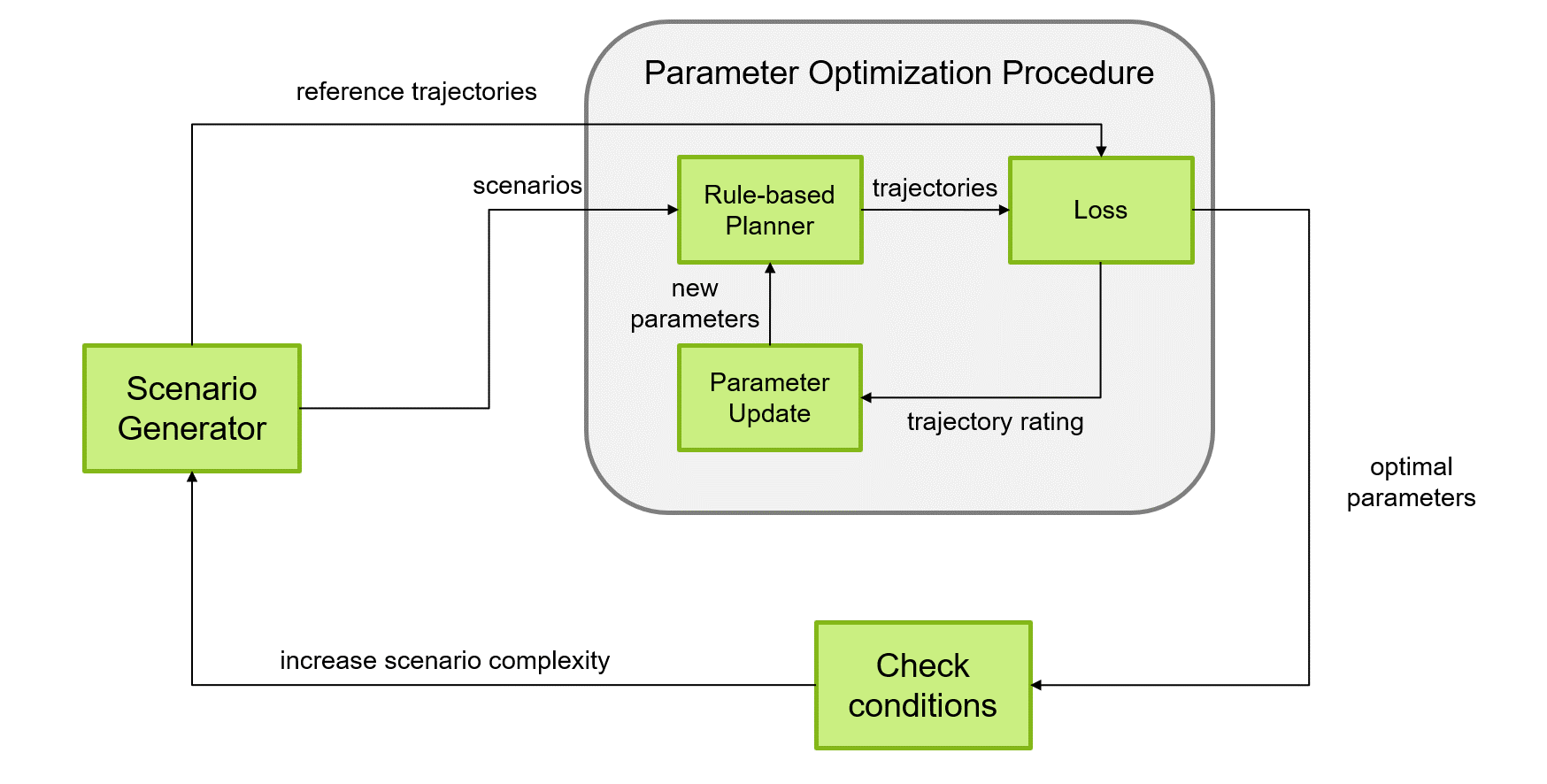
Optimierung von Regeln zur Fahrzeugführung
Sichere und komfortable Fahrzeugtrajektorien können implizit durch ein Trajektorien-Optimierungsproblem beschrieben werden. Leider kann der…
Körperposenschätzung zur Aktivitäts- und Intentionserkennung von Fußgängern im Straßenverkehr
Während die Anzahl der im Straßenverkehr verletzten und getöteten Personen im Kraftfahrzeug aufgrund der technologischen Entwicklung in den…

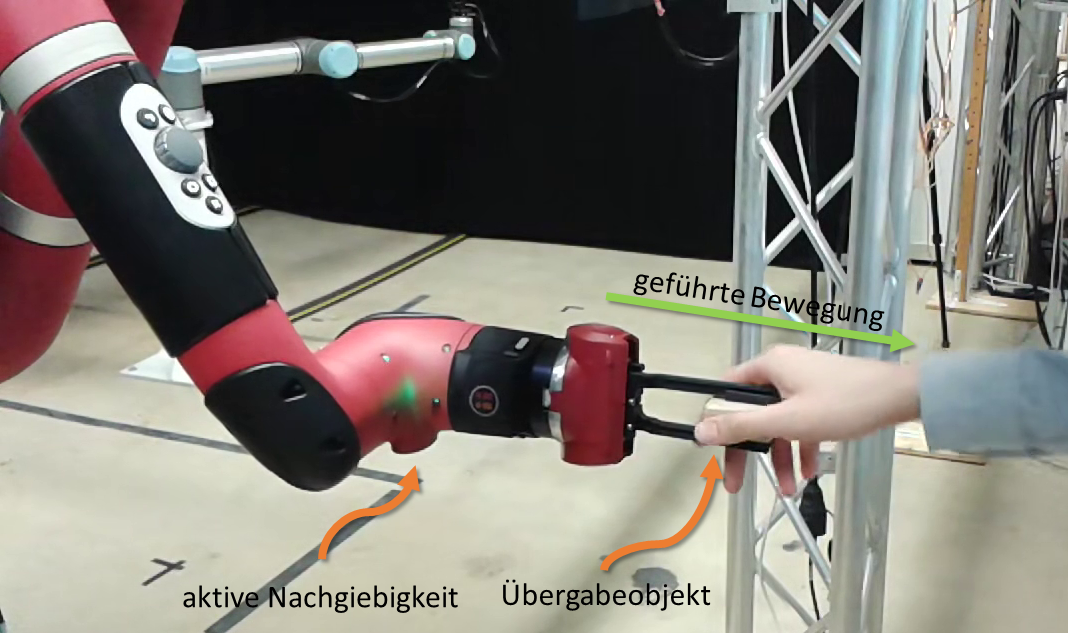
Aktive Nachgiebigkeit zur Verbesserung der physikalischen Mensch-Roboter Interaktion
Die Übergabe eines Objekts ist für Menschen ein alltäglicher und unterbewusster Vorgang.
Wir koordinieren unsere Bewegungen instinktiv und definieren…
Untersuchung der Referenztrajektorie auf die Einhaltung des aktuellen fahrdynamischen Zustands
Die Referenztrajektorie für automatisierte Fahrfunktionen wird in der Regel mit Planungsalgorithmen bestimmt, welche auf vereinfachenden Annahmen zur…
