
AHEAD – Optimal Adaptive Headlights to Improve Environment Perception for Automated Driving
Erforschung innovativer Lichtfunktionen hochauflösender Matrix-Scheinwerfer für das (teil-)automatisierte Fahren
Entwicklung von objektiviert „guten“ Lichtfunktionen für das das (teil-)automatisierte Fahren
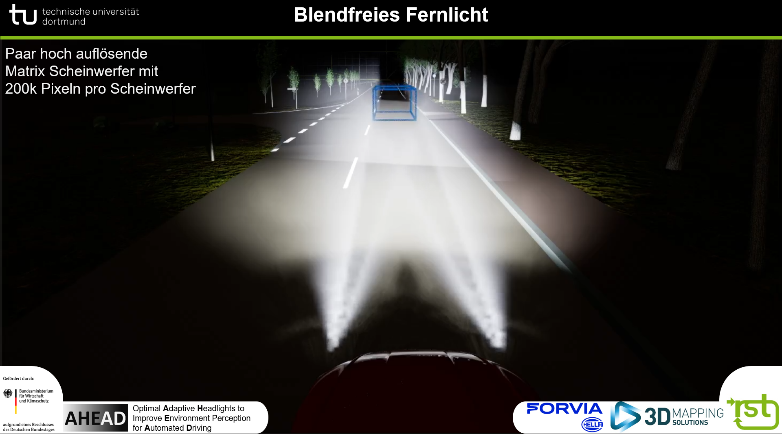
Der technische Fortschritt erhöht stetig die Anzahl der individuellen Lichtquellen, die Pixel, eines Matrix-Scheinwerfers. Dies ermöglicht die Realisierung von hochauflösenden (HD) Matrix-Scheinwerfen, welche auch unter dem Begriff DIGITAL LIGHT bekannt sind. Durch die Erforschung des (teil-)automatisierten Fahrens (AD) können moderne Fahrzeuge ihre Umgebung immer besser wahrnehmen, weshalb das Verbundprojekt „AHEAD“, bestehend aus der Kooperation der TU Dortmund, der HELLA-FORVIA und 3D Mapping Solutions, neue innovative HD-Lichtfunktionen erforscht, welche optimaler auf die aktuelle Situation reagieren können und das Fahrzeug bzw. seine Kamera bei der sicheren Wahrnehmung der Umgebung unterstützen.
Beispiele für HD-Lichtfunktionen:
- Ausblenden von anderen Verkehrsteilnehmern zur Vermeidung von Blendungen
- Gezieltes Ausleuchten von unbekannten Objekten zur besseren Objektklassifikation
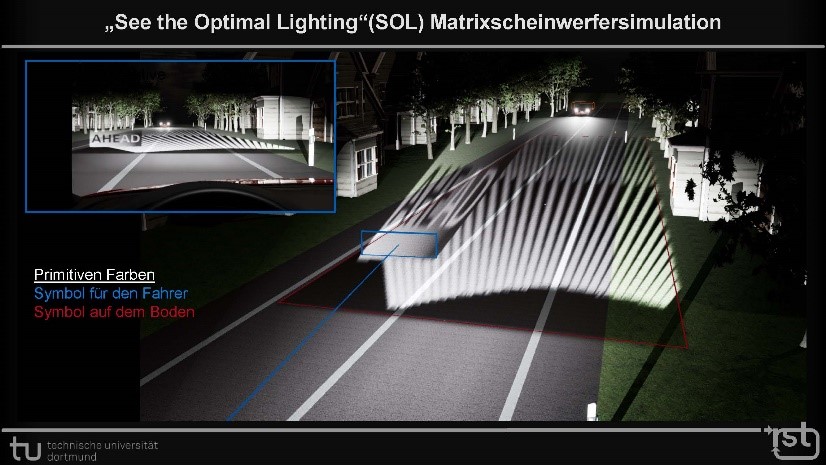
- Markieren von Gefahren als Hinweis für den Fahrer
- Projektion des zukünftigen Fahrweges des Fahrzeuges
- Projektion von Symbolen



Optimierungskriterien für HD-Lichtfunktionen
Eine „gute“ Lichtfunktion zeichnet sich durch verschiedenste Aspekte aus, welche sich zum Teil widersprechen und vom Designer Abwägungen erfordern. Das Forschungsvorhaben hat deswegen das Ziel „gute“ Systemdesigns aus Matrix-Scheinwerfer und Fahrzeug Sensorik explorativ zu finden, um das (teil-)automatisierte Fahren zu verbessern. Im Fokus des AHEAD Projektes stehen folgende Aspekte:
- Sicherheit
- Maximale Wahrnehmung der Umgebung d.h. möglichst helle, selektive und weite Ausleuchtung
- Minimale Blendung und Ablenkung aller Verkehrsteilnehmer
- Akzeptanz
- Hohes Wohlbefinden aller Verkehrs-teilnehmer durch eine ruhige und homogene Ausleuchtung
- Hohes Sicherheitsgefühl aller Personen durch einfache Wahrnehmung der Verkehrssituation
- Effizienz
- Geringer Energieverbrauch im Betrieb insbesondere für die Elektromobilität
- Geringe Kosten in der Produktion und Wahrung für einen wirtschaftlichen Einsatz
Simulationsbasiertes Rapid-Prototyping von Systemdesigns mit anschließendem Feldtest
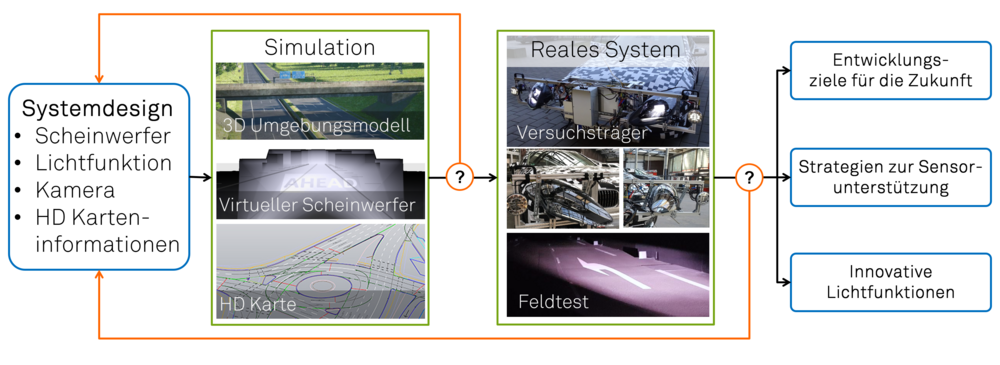
Das Projekt verfolgt einen iterativen und agilen Forschungsansatz aus der Top-Down-Perspektive. Dabei werden vielversprechende Systemdesigns aus HD-Lichtsystem und Fahrzeugkamera zweistufig evaluiert und optimiert. Die erste Stufe ist die von der TU Dortmund entwickelte "See the Optimal Lighting" SOL Echtzeit-Matrixscheinwerfersimulation der dynamischen Ausleuchtung in einem hochgenauen 3D-Umgebungsmodel einer realen Umgebung von 3D Mapping Solutions und die zweite der reale Feldtest mit einem Prototypenfahrzeug der HELLA-FORVIA.

Optimale Reaktion auf die Umgebung durch Auswertung von HD-Karteninformationen
Die Nutzung von hochgenauen Umgebungsdaten aus der Cloud wie z.B. Daten über Straßenlaternen, die Reflexionseigenschaften der Fahrbahnoberfläche und Bebauung werden es ermöglichen, die Ausleuchtung optimal an die Umgebung anzupassen.
Die Nutzung von hochgenauen Umgebungsdaten aus der Cloud wie z.B. Daten über Straßenlaternen, die Reflexionseigenschaften der Fahrbahnoberfläche und Bebauung werden es ermöglichen, die Ausleuchtung optimal an die Umgebung anzupassen.
Die Kombination aus HD Matrix-Scheinwerfer und genauen Karteninformationen z.B. die Position von Landmarken ermöglicht es dem Egofahrzeug prädiktiv die Ausleuchtung dynamisch selektiv anzupassen und nicht nur zu reagieren. Z.B. können mögliche Gefahrenstellen und dunkle Bereiche selektiv besser ausgeleuchtet oder für die Fahrzeug Sensorik wichtige Verkehrsobjekte wie die Landmarken zur Lokalisation hervorgehoben werden. Dies verbessert die Umfeldwahrnehmung von Mensch und Maschine und erhöht die Verkehrssicherheit.
Diese Arbeit wird mit Mitteln des deutschen Bundesministeriums für Wirtschaft und Klimaschutz (BMWK) als Teil des AHEAD-Projektes (Förderkennzeichen: 19A21021C) gefördert. Die Verantwortung für den Inhalt dieser Veröffentlichung liegt bei den Autoren.
