ELM - Ego Localization and Mapping
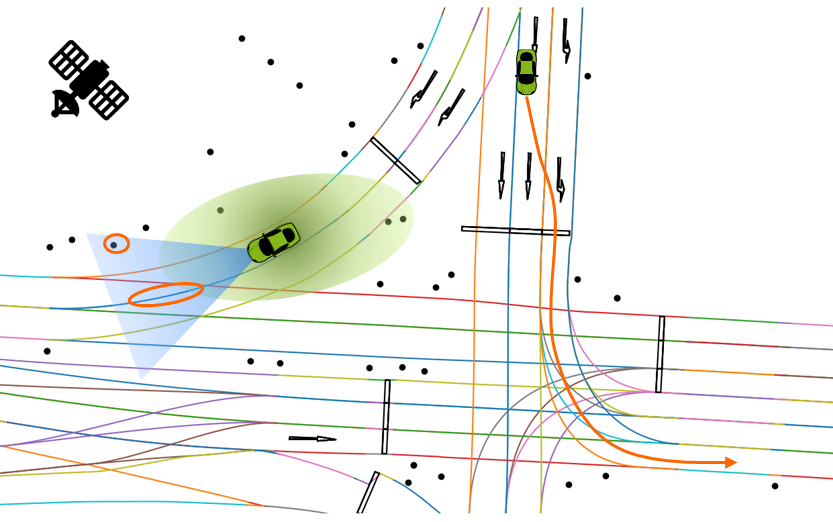
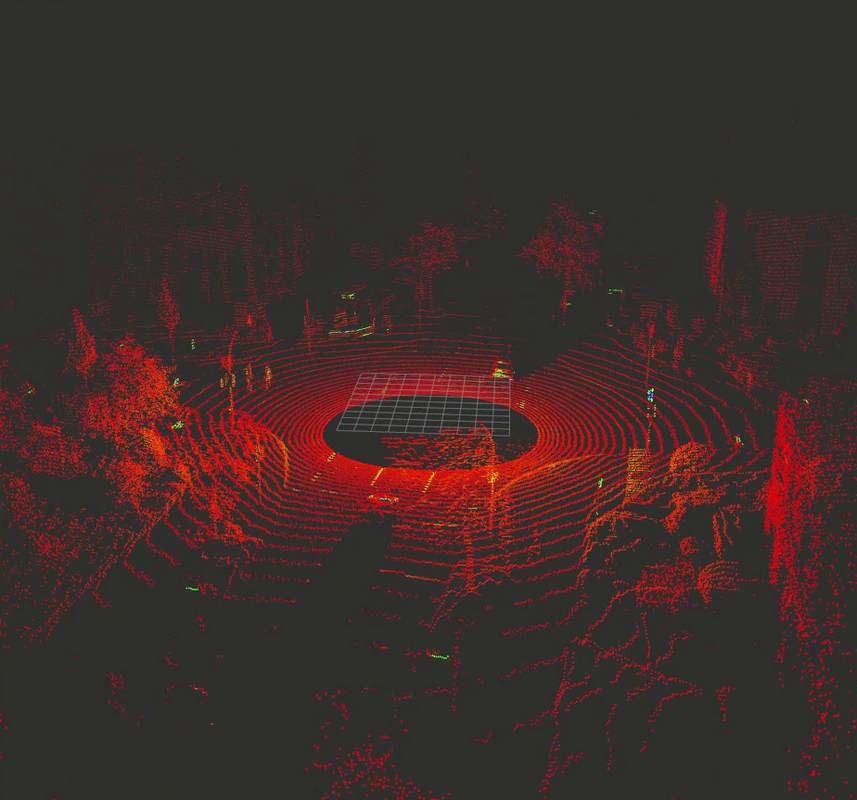
Hochgenaue Karten liefern essenzielle Informationen für automatisierte Fahrzeuge. Neben der Ermöglichung einer spurgenauen Routenplanung, verhält sich die HD-Karte wie ein zusätzlicher vorausschauender Sensor, sobald sich das Fahrzeug in der Karte lokalisiert hat. Da GPS alleine zu ungenau für eine spurgenaue Lokalisierung ist, werden die exterozeptiven Sensoren (Kamera, Radar und Lidar) des Fahrzeugs mit zur Positionsbestimmung hinzugezogen. Die Herausforderung besteht darin mit diesen Sensoren Landmarken, welche in der HD-Karte referenziert sind, zu erkennen und so auf die Position des Fahrzeugs in der HD-Karte zu schließen. Zudem ist, aufgrund des hohen Detailgrads der Karte, eine speichereffiziente Darstellung der Kartenobjekte von großer Signifikanz um echtzeitfähige Anwendungen im Fahrzeug zu ermöglichen. Das ELM Projekt beschäftigt sich darüber hinaus mit der Fragestellung, wie die HD-Karte nach der Lokalisierung zur Erweiterung des Umgebungsmodells genutzt sowie Inkonsistenzen zwischen Umgebungsmodell und HD-Karte aufgrund von veralteten Kartendaten erkannt und aktualisiert werden können.