
AIR - AI Based Imaging Radar Data Processing
Motivation
Mit zunehmender Automatisierung von Fahrfunktionen steigt die Relevanz die Umgebung erfassen zu können. Je genauer und präziser dies möglich ist, umso seltener sind unkomfortable und ggf. kurzfristige Neuplanungen der Bewegung des automatisierten Fahrzeuges notwendig.
Teure aber sehr hochauflösende Lidar Sensoren können die Umgebung sehr genau wahrnehmen. Hohe Kosten stehen jedoch einem breiten Markteintritt entgegen. Hochauflösende Radar Sensoren stehen als mögliche Alternative erst seit kurzer Zeit zur Verfügung. Im automotive Bereich werden traditionelle Radar Sensoren seit vielen Jahren genutzt, sodass dieser Sensortyp bekannt ist. Da jedoch selbst hochaufgelöste Radar Sensoren nicht an die Dichte von Punktwolken von Lidar Sensoren heran reichen, soll das AIR Projekt untersuchen, wie die Perzeption auf diese neuen hochauflösenden Radar Sensoren angepasst werden muss, um Radar-spezifische Eigenschaften (z.B. Doppler-Geschwindigkeit und Robustheit) auszunutzen und Lidare bestmöglich zu ersetzen.
3D Objektdetektion
Ein wichtiger Bereich der Perzeption ist die Erkennung von (dynamischen) Objekten im 3D Raum. Für Lidare existieren eine Vielzahl verschiedener lern-basierter Verfahren, um die Position und Größe von Objekten hochgenau aus den Punktwolken als Eingangsdaten schätzen zu können. Erste Untersuchungen haben ergeben, dass eine Erkennung von 3D Objekten aus Punktwolken hochaufgelöster Radare prinzipiell möglich ist.
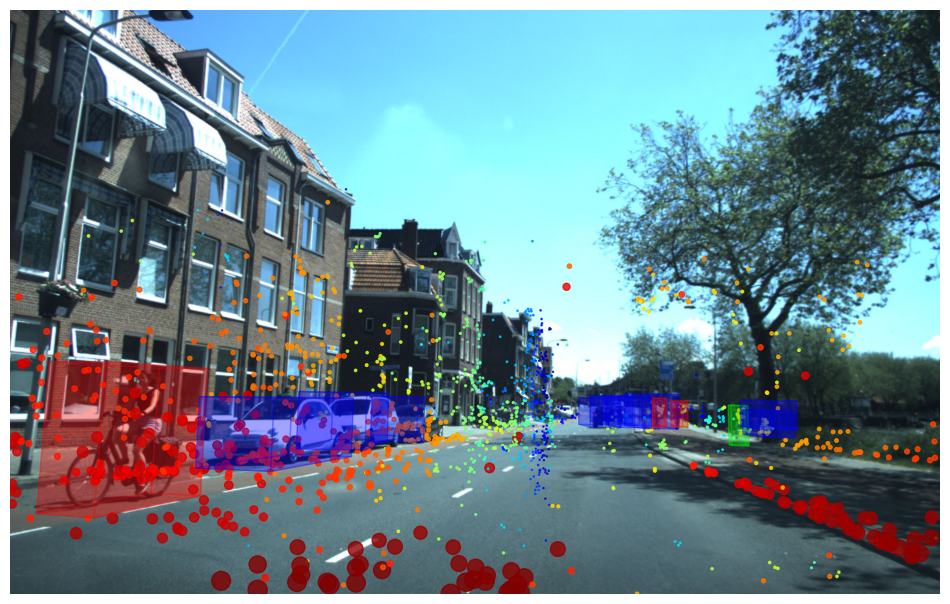
Allerdings stellt die (stark) reduzierte Dichte der Radar-Punktwolke im Vergleich zur Lidar-Punktwolke eine große Herausforderung dar. Daher sollen die Ausgangsverfahren zur 3D Objektdetektion zunächst um spezifische Module und Methoden ergänzt werden, die Probleme wie fehlende oder falsche Detektionen gezielt behandeln. Ein sehr wichtiger Aspekt der Perzeption ist die Integration des temporalen Kontextes. Erkannte Detektionen sollen einerseits im nächsten Zeitschritt gemäß ihrer Dynamik wiedererkannt und getrackt werden. Andererseits erscheint gerade für dünn besetzte Radar-Punktwolken eine Akkumulation einzelner Aufnahmen sinnvoll, da die Punktwolke dadurch künstlich angereichert werden kann. In beiden Fällen spielt die korrekte Berücksichtigung der Dynamik von Objekten eine zentrale Rolle. Die radiale Relativgeschwindigkeit kann durch die Messung der Doppler-Verschiebung vom Radar in einer einzigen Messung direkt erfasst werden. Die Integration dieser Radar-spezifische Messgröße sowie die Erweiterung der Eingangsdaten um Mono-Kamera Aufnahmen sollen im weiteren Projektverlauf zusätzlich untersucht werden.

Zielsetzung
Das übergeordnete Ziel des Projektes ist die Verbesserung der Perzeption auf Radardaten allein und basierend auf einem kombinierten Eingang von Radar- und Mono-Kameradaten. Dabei sollen die Sensor-spezifischen Vorteile des Radar Sensors so ausgenutzt werden, dass die erarbeitete Perzeption die Umsetzung einzelner oder auch mehrerer Funktionen automatisierter Fahrzeuge ermöglicht und bezüglich der Verfügbarkeit, Güte und Robustheit so weit wie möglich an ein Lidar-System heranreicht.