
Route Planning and Following
Motivation
Die Informationen, die einem automatisierten Fahrzeug über seine Umgebung zur Verfügung stehen, können, beeinflusst durch die Umgebung unvollständig oder fehlerhaft sein.
Unvollständigkeiten in diesem Umgebungsmodell werden von menschlichen Fahrern durch eine an die Situation angepasste Fahrweise kompensiert. Dies dient beispielsweise der Minimierung des Kollisionsrisikos.
Im Projekt RPF sollen daher Unsicherheiten über die Umgebung explizit in Lokalisierungs- und Planungsaufgaben einbezogen werden, um ähnliches Verhalten auch für automatisierte Fahrzeuge zu ermöglichen.
Egolokalisierung in veränderlicher Umgebung
Für die Lokalisierung sind für diese Aufgabe insbesondere die Unsicherheit über Veränderungen der verfügbaren Karte sowie die tatsächliche lokale Verfügbarkeit von Sensordaten in der Umgebung von Interesse. Verfahren müssen Entscheidungen treffen können, welche Mess- und Kartendaten in das Ergebnis mit einfließen sollten und welche möglicherweise fehlerbehaftet sind.
Um die gesamten zur Verfügung stehenden Sensordaten zu nutzen, können hier lernbasierte Verfahren schon zur Lokalisierung verwendet werden, die lernen, auf Basis zuverlässiger Merkmale der Umgebung die Position des Egofahrzeugs in der Karte rekonstruieren.
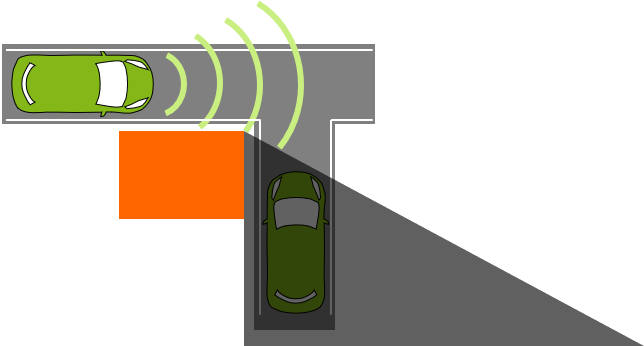
Planung bei Verdeckungen entlang des Pfades
In der Planung sollen dann für das Fahrzeug nicht einsehbare Bereiche einbezogen werden, um für urbane Szenarien wie Kreuzungen eine hohe Sicherheit bei gleichzeitig effizienter und komfortabler Fahrt zu ermöglichen.
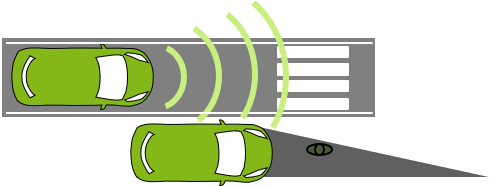
Hierfür werden probabilistische Modelle für das Verhalten anderer Verkehrsteilnehmer benötigt, die auch deren Existenzwahrscheinlichkeit in Abhängigkeit der aktuell für das Fahrzeug sichtbaren Bereiche berücksichtigen. Diese sollen im Projektverlauf so entwickelt werden, dass hierfür Karteninformationen fusioniert mit Sensordaten herangezogen werden können, um Verdeckung ausgelöst durch sowohl statische als auch dynamische Objekte berücksichtigen zu können.
Zielsetzung
Am Ende des Projekts soll ein Lokalisierungsverfahren, das die Möglichkeit von Veränderungen der Umgebung explizit berücksichtigt und darüber die eigene Zuverlässigkeit bewerten kann, stehen.
Weitergehend soll in ein Trajektorienplanungsverfahren ebenfalls eine explizite Berücksichtigung der durch die Umgebung entstehenden Unsicherheiten integriert werden, um bessere Fahreigenschaften auch für urbane Szenarien zu ermöglichen.