![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
Motivation
The information available to an automated vehicle about its environment can be incomplete or erroneous, influenced by the environment.
Incompleteness in this environment model is compensated by human drivers by a driving style adapted to the situation. This serves, for example, to minimize the risk of collision.
In the RPF project, uncertainties about the environment will therefore be explicitly included in localization and planning tasks to enable similar behavior for automated vehicles.
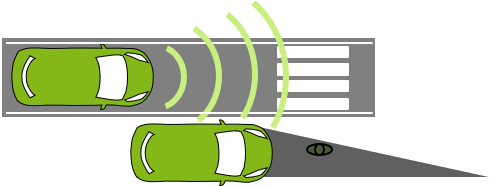
Egolocation in a changing environment
For localization, uncertainty about changes in the available map and the actual local availability of sensor data in the environment are of particular interest for this task. Procedures must be able to make decisions about which measurement and map data should be included in the result and which may be subject to error.
To make use of all the available sensor data, learning-based methods can be used here already for localization, which learn to reconstruct the position of the ego-vehicle in the map based on reliable features of the environment.
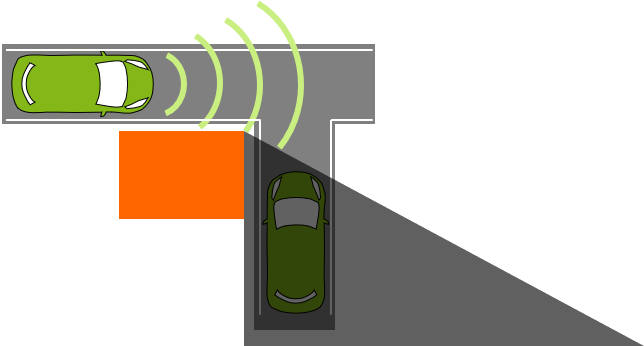
Planning for occlusions along the path
Planning should then include areas that are not visible to the vehicle in order to enable a high level of safety for urban scenarios such as intersections while providing an efficient and comfortable ride.
For this purpose, probabilistic models for the behavior of other road users are required, which also take into account their probability of existence depending on the areas currently visible to the vehicle. In the course of the project, these models will be developed in such a way that map information fused with sensor data can be used to take into account occlusion caused by both static and dynamic objects.
Objective
At the end of the project, a localization procedure is to be developed that explicitly takes into account the possibility of changes in the environment and can use this to evaluate its own reliability.
Furthermore, an explicit consideration of the uncertainties caused by the environment shall be integrated into a trajectory planning procedure in order to enable better driving characteristics also for urban scenarios.