![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
Development of a hybrid, adaptive decision strategy for automated driving
Aim of the research project
The aim of the research project is to develop a new type of decision strategy that does without the use of highly accurate map data and is also capable of learning. The adjacent figure gives an overview of the proposed overall architecture. Based on freely available map data, a static, traffic-free route planning is carried out. An improved position estimation is achieved by using Deep Learning. The environment is captured and interpreted by sensors. For decision making, possible maneuvers are first identified on the basis of which a selection is made using machine learning methods. The selected maneuver is finally optimized in the context of trajectory planning and implemented by a control system in interaction with the vehicle actuators.

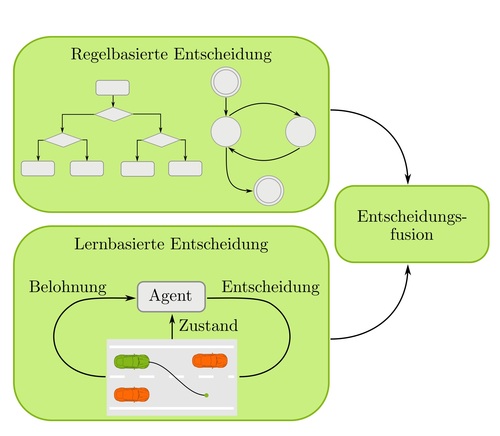
Hybrid decision strategy
The requirements of the automotive industry stipulate that decisions of automated vehicles must be traceable, interpretable and verifiable. Therefore, deterministic methods are often used for decision making. Artificial intelligence methods have great potential, but their verification is difficult. Therefore, a hybrid approach is proposed, which combines the advantages of both methods. By means of machine learning, a decision strategy is learned simulatively. Reinforcement Learning is used for this purpose. By using this tool in combination with a reachability analysis and trajectory planning online fleet learning is made possible.
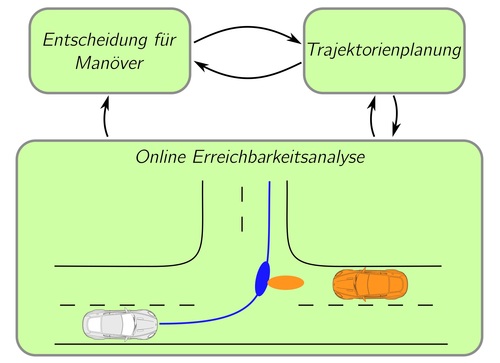
Evaluation of decisions and connection to trajectory planning
Maneuvers are proposed from the hybrid decision strategy. The proposals are based on the static pre-planning, the track-discrete costs and the environment of the ego-vehicle. To enable online fleet learning, it is necessary to provide a reward signal for the agent. A trajectory is planned for each proposed maneuver. In addition, an accessibility analysis is carried out. This analysis is based on the predicted trajectories of other road users as well as the planned trajectory of the ego vehicle. The accessibility analysis and evaluation can also be performed by a driver.