![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_5719da3df9.jpg "[Translate to English:]")
Neural networks for situation analysis for automated driving
Motivation and goals The architecture of automated vehicles can generally be divided into three major functional groups: perception of the vehicle environment, data evaluation and planning, and control of the automated vehicle. For planning on the level of tactical decision making and trajectory planning, this requires information about the current traffic situation, its history, and an estimation of all relevant future evolutions of the traffic situation that is as precise as possible. Therefore, the goal of this research project is the development of algorithms for motion prediction of neighboring road users, as they represent the traffic situation for the ego-vehicle. In addition, these neighboring road users are of particular interest for the motion planning of the ego-vehicle, since they may limit the possibilities of how the ego-vehicle can move and behave and thus represent comfort- and safety-relevant limitations. The focus is initially on highway situations, but will later be extended to complex urban scenarios.
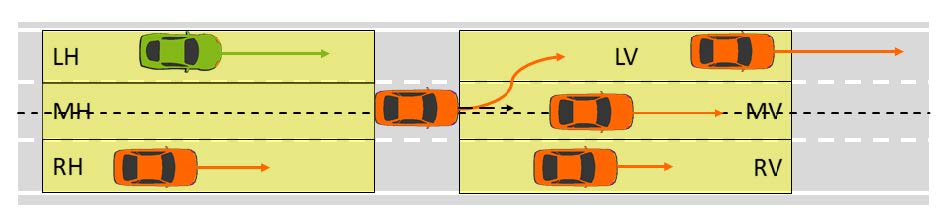
Maneuver detection Initially, the simplest possible prediction methods will be investigated, which may already lead to sufficiently accurate prediction results in combination with minimal vehicle environment sensors. Assuming constant speed and acceleration, sufficiently accurate predictions in longitudinal direction can be made for short time horizons of a few seconds. Due to the high degree of structure in highway scenarios, only the three basic maneuvers lane change to the left (SWL), lane change to the right (SWR) and lane keeping can be executed. Therefore, already the detection of these basic maneuvers represents important information about the movement of vehicles in lateral direction. The adjacent figure shows how a lane change of a vehicle in front (orange, center) to the left into its lane can be detected from the perspective of the ego vehicle (green) and how the overall situation motivates a lane change in this case.
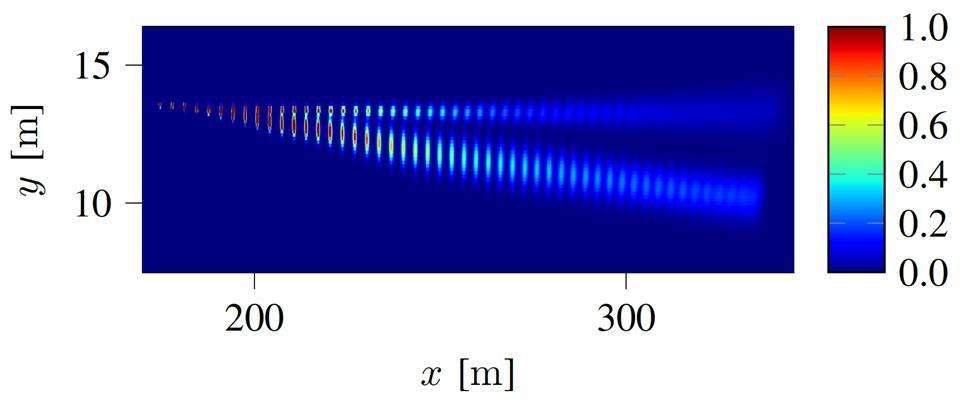
Trajectory Prediction Later, more complex prediction models are also investigated. Key features of a performant prediction approach are: maneuver-discrete multimodality, probabilistic prediction representation, inclusion of the situation context and interaction awareness between road users. Both model and data-based and combined prediction methods are used. The graph on the right shows the multimodal probability density distribution of a predicted trajectory over 5s.