Neuronale Netze zur Situationsanalyse für das automatisierte Fahren
Motivation und Ziele
Die Architektur automatisierter Fahrzeuge lässt sich allgemein in drei große Funktionsgruppen einteilen: die Wahrnehmung des Fahrzeugumfeldes, die Datenauswertung und Planung sowie die Regelung des automatisierten Fahrzeuges. Für die Planung auf Ebene der taktischen Entscheidungsfindung und der Trajektorienplanung sind dafür Informationen über die aktuelle Verkehrssituation, deren Historie und eine möglichst präzise Schätzung aller relevanten zukünftigen Evolutionen der Verkehrssituation notwendig.
Ziel des Forschungsvorhabens ist daher die Entwicklung von Algorithmen zur Bewegungsprädiktion benachbarter Verkehrsteilnehmer, da diese die Verkehrssituation für das Ego-Fahrzeug abbilden. Außerdem sind diese benachbarten Verkehrsteilnehmer von besonderem Interesse für die Bewegungsplanung des Ego-Fahrzeugs, da sie die Möglichkeiten wie sich das Ego-Fahrzeug bewegen und verhalten kann ggf. einschränken und somit komfort- und sicherheitsrelevante Limitierungen darstellen. Der Fokus liegt dabei zunächst auf Autobahnsituationen, soll später aber auf komplexe urbane Szenarien erweitert werden.
Manövererkennung
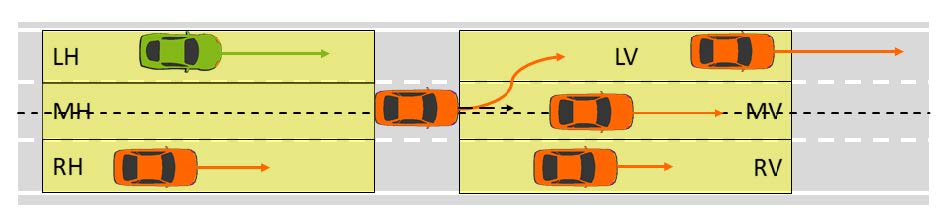
Zunächst werden möglichst einfache Prädiktionsverfahren untersucht, die ggf. bereits in Kombination mit minimaler Fahrzeugumfelderfassungssensorik zu hinreichend genauen Prädiktionsergebnissen führen. Unter der Annahme konstanter Geschwindigkeit, respektive Beschleunigung, können für entsprechend kurze Zeithorizonte von wenigen Sekunden hinreichend genaue Prädiktionen in longitudinaler Richtung vorgenommen werden. Da auf Grund des hohen Grades an Struktur in Autobahnszenarien nur die drei Basismanöver Spurwechsel nach links (SWL), Spurwechsel nach rechts (SWR) und Spurhalten ausgeführt werden können, stellt bereits die Erkennung dieser Basismanöver eine wichtige Information über die Bewegung von Fahrzeugen in lateraler Richtung dar. Die nebenstehende Abbildung zeigt wie aus Sicht des Ego-Fahrzeugs (grün) ein Spurwechsel eines vorausfahrenden Fahrzeugs (orange, Mitte) nach links auf seine Spur erkannt werden kann und wie die Gesamtsituation in diesem Fall einen Spurwechsel motiviert.
Trajektorienprädiktion
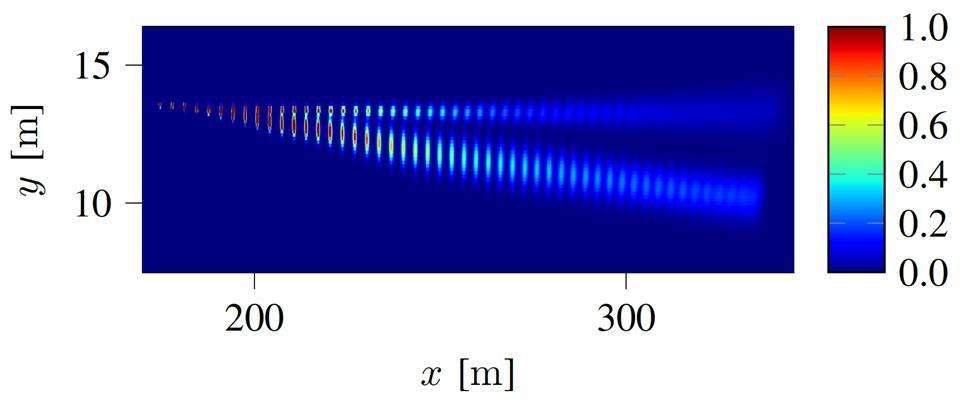
Später werden auch komplexere Prädiktionsmodelle untersucht. Wesentliche Merkmale eines performanten Prädiktionsansatzes sind: manöverdiskrete Multimodalität, probabilistische Prädik-tionsrepräsentation, Einbeziehung des Situationskontextes und Interaktionsbewusstsein zwischen den Verkehrsteilnehmern. Dabei kommen sowohl model als auch datenbasierte und kombinierte Prädiktionsverfahren zum Einsatz. Die nebenstehende Grafik stellt die multimodale Wahrscheinlichkeitsdichteverteilung einer prädizierten Trajektorie über 5s dar.