
Modellprädiktive Regelung mechatronischer Systeme
Motivation und Ziel
Zur schnellen und präzisen Regelung mechatronischer Systeme, insbesondere in industriellen Anwendungen, werden zumeist kaskadierte Regelungskonzepte auf Basis von PID-Reglern verwendet. Die einzelnen PID-Regler werden mit nichtlinearen Kennlinien für die integrale und proportionale Verstärkung erweitert, um den Anforderungen an das Systemverhalten gerecht zu werden. Diese Regelungskonzepte weisen eine hohe Anzahl an verkoppelten Reglerparametern auf. Der Reglerentwurf ist somit nicht intuitiv und erfordert zumeist den Einsatz einer automatisierten evolutionären Hardware-in-the-Loop Optimierung. Eine nachträgliche Anpassung des Systemverhaltens ist nur durch einen Prozessexperten möglich. Gesucht ist damit ein universales Regelungskonzept, welches garantiert echtzeitfähig ist, eine hohe Regelungsgüte liefert und einen intuitiven manuellen Reglerentwurf ermöglicht. Darüber hinaus sollen Stell- und Zustandsbeschränkungen explizit eingehalten werden. Häufig weist der äußere Regler einer bestehenden Kaskade die höchste Komplexität auf. Für einen geringen Realisierungsaufwand soll der äußere Regler ersetzt und der restliche Regelkreis beibehalten werden.
Modellprädiktive Regelung
Die modellprädiktive Regelung stellt ein fortschrittliches Regelungskonzept dar. In jedem Abtastschritt wird ein Optimalsteuerungsproblem gelöst. Dabei wird das zukünftige Systemverhalten über einen beschränkten gleitenden Horizont prädiziert. Zur Realisierung und der Anpassung dieser Regelung für reale Anwendungen muss die Ingenieurin/ der Ingenieur mit numerischen Diskretisierungsmethoden, nichtlinearer Optimierung sowie einer effizienten Implementierung zur Einhaltung von Echtzeitbeschränkungen vertraut sein. Dieses Forschungsvorhaben beschäftigt sich unter anderem mit der Entwicklung von modellprädiktiven Regelungskonzepten ohne den Einsatz von ableitungsbasierten Optimierungsalgorithmen. Zur Reduktion der Rechenzeit werden zudem die Freiheitsgrade während der Prädiktion stark eingeschränkt. Das Ergebnis sind echtzeitfähige modellprädiktive Regelungen für Systeme mit kleinen Abtastzeiten. Im Fokus der praktischen Entwicklung stehen die einfache Implementierung und der intuitive Reglerentwurf [1]. Die methodische Entwicklung konzentriert sich auf die Sicherstellung wichtiger regelungstechnischer Eigenschaften wie der Vorwärtsinvarianz und der asymptotischen Stabilität [2].
Modellprädiktiven Regelung bei der ganzheitlichen Optimierung mechatronischer Systeme
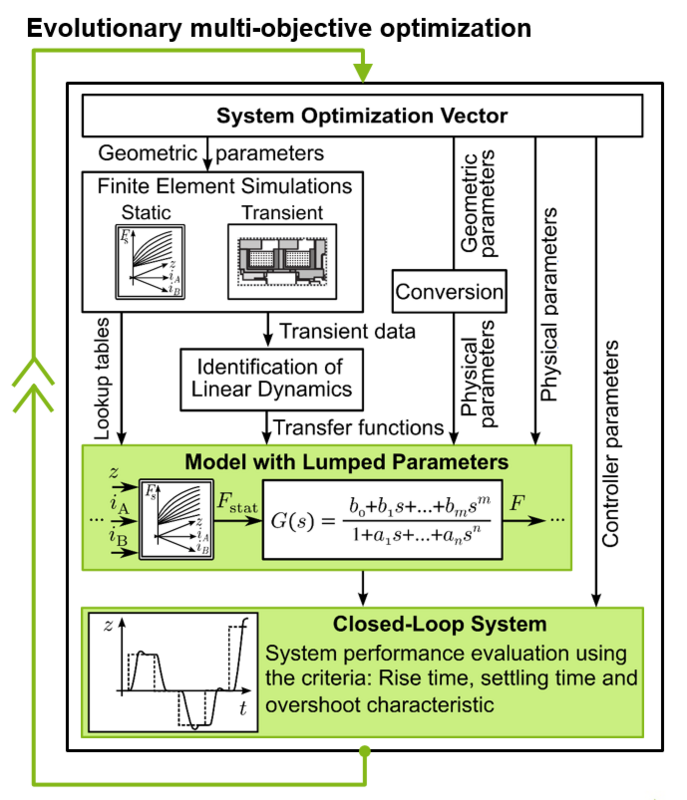
Neben der Regelung realer Prozesse eignet sich die modellprädiktive Regelung auch für die ganzheitliche Systemoptimierung. Das Wechselspiel von Komponenten aus verschiedenen Domänen trägt maßgeblich zur Leistungsfähigkeit mechatronischer Systeme bei. Die ganzheitliche Systemsimulation und Optimierung ermöglicht es die Teilsysteme bereits in einem frühen Entwicklungsstadium aufeinander abzustimmen. Während der Optimierung werden zahlreiche Parameterkombinationen getestet und bewertet. Dabei können die Optimierungsvariablen Konstruktionsparametern oder allgemein physikalischen Größen entsprechen. Da die Leistungsfähigkeit mechatronischer Systeme oft anhand der Regelungsgüte bewertet wird, stellen damit auch die Reglerparameter Optimierungsvariablen dar. Sobald der Optimierungsalgorithmus Änderungen an der Konstruktion des mechatronischen Systems in einer Iteration vornimmt (siehe Abbildung 1), ändert sich das Systemverhalten des virtuellen Prototyps. Um nicht die Robustheit des Reglers zu bewerten, muss der Regler in jeder neuen Iteration anhand verschiedener Kriterien neu ausgelegt werden. Dieses Vorgehen ist sehr zeitaufwändig und ermöglicht keine vollautomatisierte Entwicklung neuer Prototypen. Die modellprädiktive Regelung ermöglicht es jedoch ohne den Eingriff des Menschen neue Prototypen zu entwickeln. In jeder Iteration der Systemoptimierung wird ein neues nichtlineares Modell der gesamten Regelstrecke ermittelt. Dieses kann wiederum genutzt werden, um selbst als Teil der modellprädiktiven Regelung verwendet zu werden. Durch die ständige Aktualisierung des Modells passt sich das Regelungskonzept automatisch an das neue Systemverhalten an. Obwohl die Regelungsgüte als Bewertungsgrundlage verwendet wird, kann der Reglerentwurf aus dem virtuellen Entwicklungsprozess weitestgehend ausgeblendet werden. Das Gesamtmodel kann Anforderungen an die Glattheit nicht erfüllen. Ein Grund hierfür ist beispielsweise der Einsatz stückweiser linearer Kennlinienfelder. Aus diesem Grund eignen sich insbesondere modellprädiktive Regelungen mit ableitungsfreien Optimierungsalgorithmen [3]. Die entwickelte ganzheitliche Systemoptimierung hat sich bereits bei der virtuellen Entwicklung hydraulischer Wegeventile im Kontext von Industrie 4.0 als zukunftsweisend erwiesen [4].
[1] A. Makarow, M. Keller, C. Rösmann und T. Bertram, „Model Predictive Trajectory Set Control with Adaptive Input Domain Discretization“, in American Control Conference (ACC), 2018.
[2] A. Makarow, C. Rösmann und T. Bertram, „Single Degree of Freedom Model Predictive Control with Variable Horizon“, in American Control Conference (ACC), 2020.
[3] A. Makarow, J. Braun, C. Rösmann, G. Schoppel, I. Glowatzky und T. Bertram, „Introduction of Model Predictive Control for the System Optimization of a Proportional Directional Control Valve“, in IEEE Conference on Control Technology and Applications (CCTA), 2018.
[4] S. Haack, „Hydraulik für die Fabrik der Zukunft“, in Der Konstrukteur, Ausgabe September 2018.