
Entwicklung von Situationsanalysemodulen für automatisierte Fahrzeuge in virtueller Umgebung
Motivation und Ziele
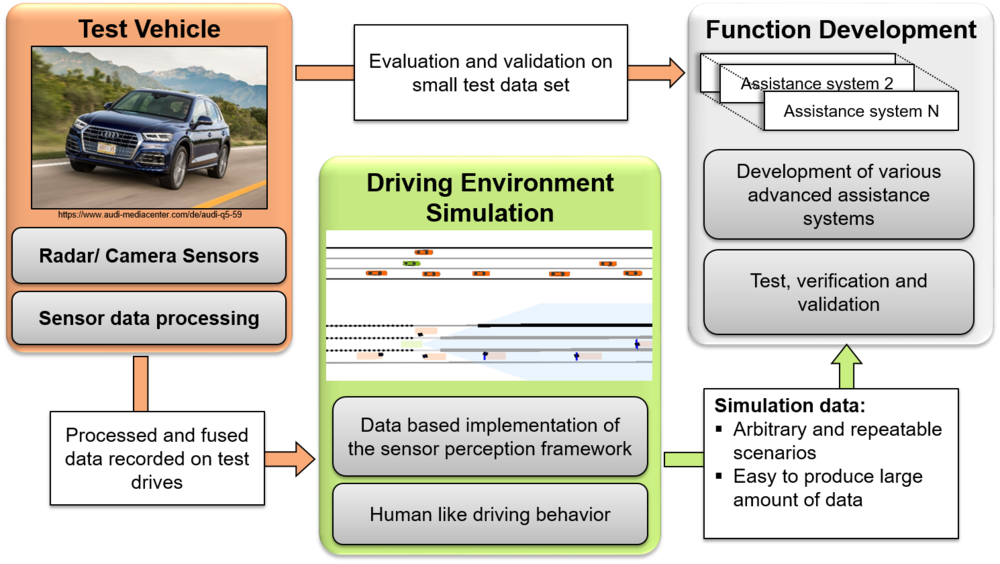
Für zukünftige automatisierte Fahrfunktionen ist ein vollständiges Verständnis der aktuellen Fahrsituation und deren zukünftige Entwicklung unverzichtbar. Allerdings können im Straßenverkehr beliebig komplexe Situationen entstehen, die nicht mit einem begrenzten Satz von Regeln beschrieben werden können. Um Algorithmen in möglichst vielen Situationen zu testen, wird eine Simulationsumgebung benötigt, die sowohl die Eigenschaften der Sensoren als auch das Fahrverhalten anderer Verkehrsteilnehmer realistisch abbildet. Mit der entwickelten Simulationsumgebung werden anschließend unterschiedliche Module für die Situationsanalyse entwickelt. In einem ersten Schritt wird die strukturierte Umgebung auf Autobahnen ausgenutzt, um jedem Fahrzeug eine Manöverklasse zuzuordnen. Dabei kann zwischen den Basismanövern Spurwechsel und Spurhalten unterschieden werden aus denen sich alle komplexeren Manöver zusammensetzen lassen. Um neben der eigentlichen Manöverklasse auch zeitliche Informationen zu nutzen, wird die verbleibende Zeit bis zum Überqueren der Spurmarkierung geschätzt. Auf dieser Basis können die Verteilung der möglichen zukünftigen Trajektorien aller Verkehrsteilnehmer berechnet werden. Als Erweiterung können Interaktionen zwischen den einzelnen Teilnehmern explizit mit modelliert werden.
Fahrermodellierung
Die Simulation verwendet ein individuell parametriertes Intelligent Driver Model und ein probabilistisches Spurwechselmodell, um menschliches Fahrverhalten der Simulationsfahrzeuge zu erzeugen. Neben der Manöverauswahl wird auch dessen Durchführung stochastisch modelliert. Dazu wird das eigentliche Manöver mit einer Stichprobe eines Gauß Prozesses überlagert. Die Parameter des Gauß Prozesses beschreiben die Ausprägung sowie Frequenz der Abweichungen und können anhand von aufgenommenen Beispielen aus dem Straßenverkehr gelernt werden.
Sensormodellierung
Bei autonomen Fahrzeugen kommen unterschiedliche Sensoren zum Einsatz, um die Umgebung wahrzunehmen. Die Informationen aller Sensoren werden in einem nachfolgenden Schritt zu einer globalen Repräsentation fusioniert. Für die Entwicklung von Funktionen der Situationsanalyse sind einzelne Sensoren nicht von Interesse. Daher wird eine datenbasierte Abbildung der Unsicherheiten für die gesamte Wahrnehmungskette vorgenommen. Die Unsicherheit hängt dabei von dem aktuellen Zustand des Objekts, der Trackingzeit und einem Zufallsterm ab. Zusätzlich werden weitere sensorspezifische Effekte modelliert.
Manöverklassifikation
Das Ziel der Manöverklassifikation ist die Bestimmung des wahrscheinlichsten Manövers aus einem Satz von Manövern für andere Verkehrsteilnehmer auf Basis verschiedener Merkmale. Dabei werden zum einen objektbasierte Merkmale verwendet, die die Bewegung des beobachteten Fahrzeugs innerhalb der Spur beschreiben und zum anderen situationsbasierte Merkmale, die die aktuelle Verkehrssituation darstellen. Alle Merkmale können mit aktuellen automotive Sensoren gemessen werden. Für die Klassifikation wird ein Multiclass Support Vector Machine Ansatz gewählt, der im One-vs-One Verfahren trainiert wird.
Time-To-Lane-Change Vorhersage
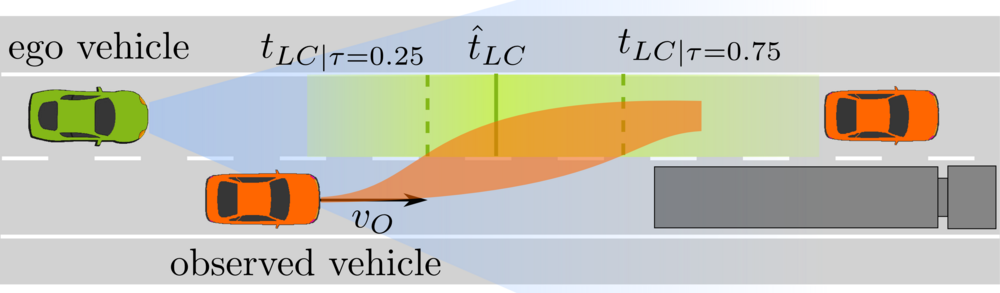
Zusätzlich zum vorhergesagten Manöver ist der Zeitpunkt eines Spurwechsels für automatisierte Systeme von großem Interesse. Da die Schätzung des Zeitpunktes vielen Unsicherheiten unterliegt (z.B. menschliches Verhalten), wird die Wahrscheinlichkeitsdichteverteilung des Spurwechselzeitpunktes geschätzt. Die Schätzung wird auf Basis ähnlicher Merkmale wie bei der Manöverklasssifikation mit Hilfe eines Quantile Regression Forests durchgeführt. Hierbei wird die Verteilung durch eine beliebige Anzahl von Quantilen approximiert. Die beste Punktschätzung ist dabei der Median.
Manöverbasierte Trajektorienprädiktion
Neben dem aktuellen Manöver ist die zukünftige Trajektorie der anderen Verkehrsteilnehmer von großem Interesse. Aufgrund von Unsicherheiten ist die Vorhersage einer einzelnen Trajektorie nicht ausreichend, sondern die gesamte Wahrscheinlichkeitsdichte der zukünftigen Zustände ist erforderlich. Diese hängt zum einen von dem Zustand und der Umgebung und zum anderen vom aktuellen Manöver ab. Für die Prädiktion wird ein Mixture of Experts Ansatz eingesetzt, in dem die Manöverwahrscheinlichkeiten als gating Funktionen genutzt werden. Die manöverspezifischen Trajektorien können zum Beispiel durch Gaussian Mixture Models repräsentiert werden.
Interaktionsbewusste Trajektorienprädiktion
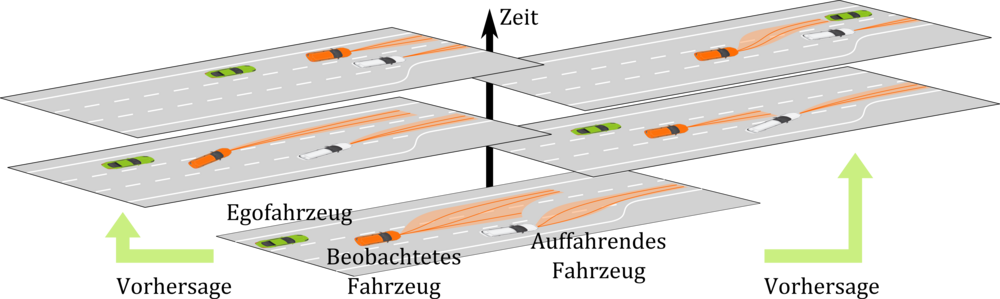
Die manöverbasierte Trajektorienprädiktion vernachlässigt die Wechselwirkung zwischen einzelnen Fahrzeugen in der aktuellen Fahrsituation. Allerdings sind gerade in Einfädelszenarien diese Abhängigkeiten von großer Bedeutung. In einem weiteren Schritt wird daher eine interaktionsbewusste Trajektorienprädiktion durchgeführt.
Das Projekt wird in Kooperation mit der ZF Group durchgeführt.