ACA
Motivation
Der Mensch, als Fahrzeugführer, ist vielfach in kritischen Verkehrsszenarien nicht in der Lage das Fahrzeug stabil und sicher zu führen wie zum Beispiel beim Ausweichen eines Hindernisses. Um politische Ziele, wie beispielsweise die Reduktion der Verkehrstoten, zu erreichen, muss der Fahrer bei der Fahrzeugführung im fahrphysikalischen Grenzbereich unterstützt und in seiner Verantwortung entlastet werden. Das Projekt Autonomous Collision Avoidance hat das Ziel ein Kollisionsvermeidungsalgorithmus zu entwerfen, der unabhängig von der Situation automatisch eine Kollision vermeiden kann.
Vorgehen
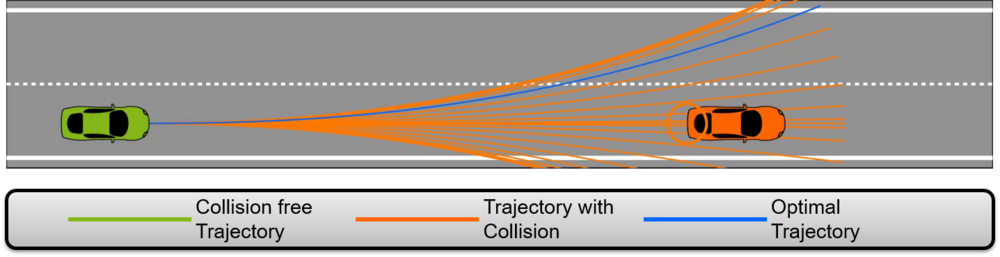
Zur Kollisionsvermeidung werden mithilfe eines Fahrdynamikmodells Trajektorien berechnet. Dazu werden jeweils die Stellgrößen u für jede mögliche Kombination über einen Prädiktionshorizont t_P konstant gehalten. Die durch dieses Vorgehen erhaltenen Trajektorien werden auf Kollisionsfreiheit überprüft. Aus den Kollisionsfreien wird diejenige ausgewählt, welche die geringsten fahrdynamischen Größen aufweist. Als Stellgrößen bieten sich in einem ersten Schritt der Lenkwinkel und die Fahrzeugverzögerung an, wobei für eine Verbesserung zudem radselektives Bremsen, eine Hinterachslenkung und Torque Vectoring in einer Simulation betrachtet werden. Diese Betrachtung ermöglicht das maximale Potential zur Kollisionsvermeidung des Fahrzeuges zu evaluieren.