![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
ACA
Motivation:
The human driver is often not able to guide the vehicle stable and safe in critical traffic scenarios, for example when avoiding an obstacle. To achieve political goals, such as the reduction of traffic fatalities, the driver must be supported in driving the vehicle at the physical limits of driving and relieved of his responsibility. The project Autonomous Collision Avoidance aims to design a collision avoidance algorithm that can automatically avoid a collision regardless of the situation.
Approach:
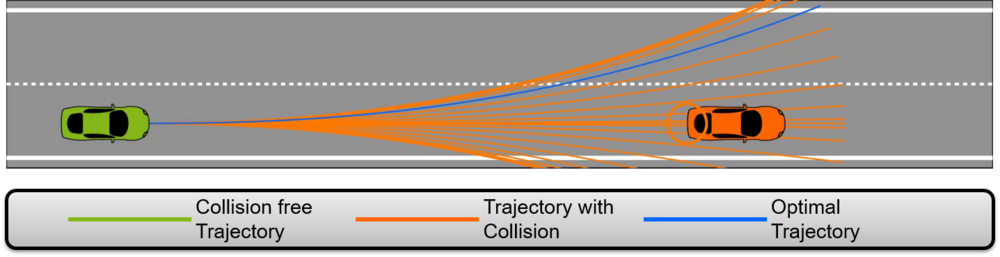
For collision avoidance, trajectories are calculated with the help of a vehicle dynamics model. For this purpose, the input variables are kept constant over a prediction horizon for each possible combination. The trajectories obtained by this procedure are checked for freedom from collisions. From the collision-free trajectories, the one with the lowest vehicle dynamics is selected. In the first step, the steering angle and the vehicle deceleration can be used as manipulated variables. For an improvement, wheel-selective braking, rear-axle steering, and torque vectoring are also considered in a simulation. This observation allows for evaluating the maximum potential for collision avoidance of the vehicle.