![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
InVerSiV - Intelligent Traffic Infrastructure for Safe Connected Driving in the Megacity
While research in the field of highly automated driving on highways is already relatively advanced, the topic of automated driving in complex environmental situations is still "in its infancy".
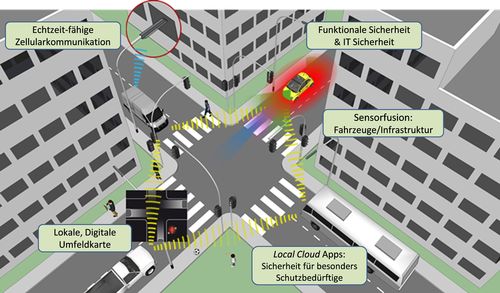
The InVerSiV research project therefore focuses on the particular challenges of assisted, partially automated and highly automated driving in the complex environment of megacities. The approach envisages networking the (growing) sensor technology in vehicles with the roadside infrastructure, which is equipped with sensors for environment recognition. In combination with further information from local and global control centers, this can provide a much more comprehensive picture of the environment and the driving situation compared with purely vehicle-based sensor technology.
The aim of the InVerSiV project is, on the one hand, to make the complexity of a megacity manageable for automated driving in the future, and, on the other hand, to detect hazards for road users in the megacity that are not equipped with their own sensors (motor vehicles, pedestrians and cyclists) at an early stage and to derive appropriate responses. For this purpose, relevant methods for safety assessment and verification will be considered and further developed for the innovative scenario "Automated Driving in the Megacity".