![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
AMP - Advanced Motion Planning
Motivation
The development of components for highly automated driving functions is currently of great commercial, scientific, and political interest. Automated driving is not only a comfort function but also has the potential to make road traffic safer and more efficient in the long term.
The problem of automated driving is often divided into sub-problems. One such sub-problem is to find the optimal trajectory for the given scene. Many approaches rely on an optimization-based planning strategy. Despite the availability of efficient search heuristics and optimization algorithms, an application to typical standard automotive ECUs requires in general simplifications of the problem formulation to meet the runtime requirements. This comes at the cost of a smaller solution space, which might result in a suboptimal trajectory and therefore motivates a trajectory generation based on explicate functions. The functions parameters are organized in lookup tables in such a way that a human expert can comprehend their influence on the output trajectory.
Expert Planner and Driving Comfort
A time-optimal trajectory planner shall serve as an expert, which provides example trajectories to now choose the lookup table parameters optimally. Still, it is not known if the resulting trajectories are experienced as comfortable from a passenger’s point of view. During lane change maneuvers for example the timing and absolute values of lateral acceleration and lateral jerk are essential quantities for perceived comfort.
In many cases, comfort is evaluated during a test drive which, can be time-consuming. Thus, it is advantageous to evaluate the optimal parameters according to objective criteria before application in a test vehicle.
Project Goals
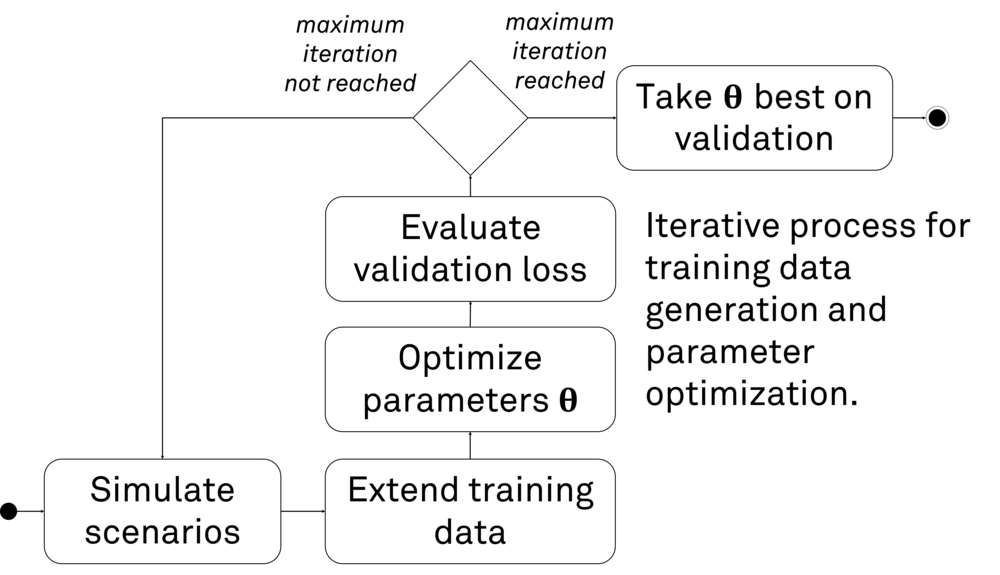
Throughout the project, a software framework shall be developed that chooses the parameters of a trajectory generation algorithm optimally. The optimal parameters shall lead to comfortable lane change trajectories with high probability so that the tuning effort in the test vehicle is reduced.