![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_5719da3df9.jpg "[Translate to English:]")
DTG - Dynamic Trajectory Generation
Motivation
The number of driver assistance systems and automated driving functions is constantly increasing. It can be assumed that further functions to support the driver in complex traffic situations will also find their way into modern vehicles in the future. The main aspects for the use of automated driving functions are for the most part in the improvement of the
safety as well as an increase in comfort. For predictive driving, future driving functions must predict the dynamic environment and also plan the vehicle's own movement. Within the architecture of automated vehicles, this results in a special role for the area of trajectory planning. The challenge is to find a collision-free trajectory that takes into account the driving dynamics and depends on the current traffic situation, while observing the applicable traffic regulations.
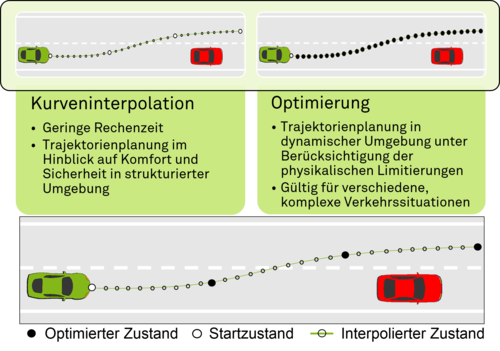
Linking curve interpolation and optimization methods.
Spline-based trajectory planning uses an interpolation strategy under the assumption that a sufficiently accurate approximation of the automated maneuver exists within each spline interval. Interpolation can reduce the number of optimization variables required within the continuous optimization procedure, and the resolution of the trajectory can be chosen independently of the interpolation. This can increase the efficiency for solving the trajectory planning problem. The method combines the strengths of an optimization procedure with those of curve interpolation. For this purpose, a spline is defined in ${}^{F}x(t)$ and ${}^{F}y(t)$. Depending on the interpolation order, the spline coefficients are determined via the initial and final conditions, as well as the continuity conditions between two time intervals. To determine the optimal transition time from one interval to the next, the time points are also optimized. Due to the spline-based formulation, the trajectory can be considered continuous in time, which allows the choice of temporal resolution independent of the grid points and the prediction horizon. Interpolation is used to compute the trajectory points that result in the trajectory of the ego-vehicle.
Combination of discrete and continuous optimization
The disadvantage of continuous optimization methods for trajectory planning is that the problem formulation does not exclude the possibility of finding a local minimum as optimal solution. To avoid local minima, graph-based methods can be used as an extension, which precede the optimization and perform a suitable initialization. In a first step, graph-based methods generate a graph which contains the costs for the respective maneuver. To generate the graph, the manipulated variables on the one hand and the state space on the other hand can be discretized. In a second step, the trajectory is determined as the branch with the lowest cost via a graph search procedure. The challenge in this procedure lies in the generation of a graph, which must contain a suitable trajectory for the situation at hand. With respect to the optimality of the trajectory, it can be seen that the solution of this procedure is only resolution-complete, since a discretization of the state space must be performed. A finer discretization is opposed to a longer computation time. By linking with a subsequent continuous optimization, a much coarser discretization of the state space can be performed without having already excluded the optimal solution in advance by choosing the example trajectories. The discrete method can be used in the first step to make a suitable initialization of the trajectory. In the further course, the trajectory is optimized and then passed to the trajectory follower. For the next step, the optimized trajectory can now be set as the new initialization according to the warm start principle. It can be assumed that the trajectory still corresponds to the globally optimal solution. To exclude that this assumption is not fulfilled, the solution of the discrete method can be cyclically compared with the solution of the continuous method. If the optimal trajectory of the discrete method represents a better solution in the sense of the optimality criterion than the solution obtained by continuous optimization, the initial trajectory is updated by the discrete method. This ensures that even if the continuous optimization converges to a local optimum, it is still possible to find the global optimum by reinitialization.
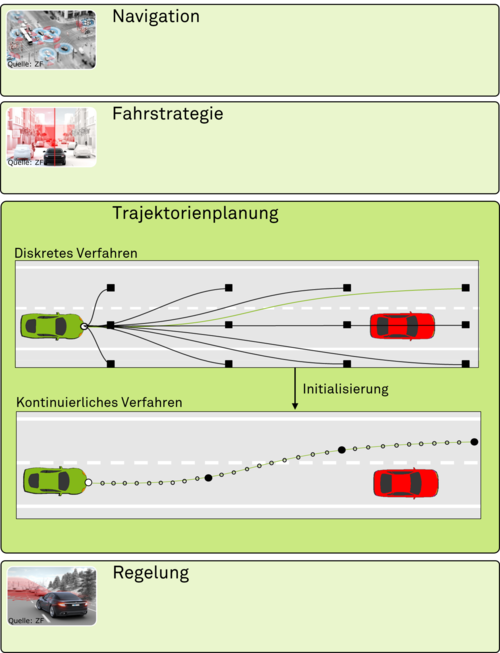
Trajectory planning in the architecture of automated vehicles
Within the architecture of automated vehicles, trajectory planning can be seen as a submodule that determines a trajectory based on the requirements from the driving strategy. In addition to the requirements of static route planning in the navigation layer, the environmental situation of the ego vehicle must also be taken into account. The planned trajectory is then implemented by a corresponding control module. The vehicle must thus be able to follow the specified target trajectory by adopting the longitudinal and lateral guidance. The application particularly requires control systems that consider the vehicle dynamics holistically across all areas of the vehicle dynamics. One challenge is the coupling between lateral and longitudinal dynamics, which cannot be neglected, especially at high lateral and longitudinal accelerations.
The project is being carried out in cooperation with the ZF Group.