
6GEM+ - Wertorientierte 6G-Kommunikationssysteme für die vernetzte digitale Industrie
Das Projekt 6GEM+ ist ein gemeinsames Forschungs- und Transferprojekt der RWTH Aachen,
der Ruhr-Universität Bochum, der TU Dortmund sowie der Fraunhofer-Institute IPT und IML
zur nächsten Mobilfunkgeneration 6G. Im Mittelpunkt steht die Frage, wie neue
Kommunikationstechnologien künftig zuverlässige, sichere und leistungsfähige
Anwendungen in Industrie, Mobilität und Gesellschaft ermöglichen können. Der Lehrstuhl
für Regelungssystemtechnik forscht im Rahmen des Projekts zu kollaborativer
Umgebungswahrnehmung und teleoperativem Fahren.
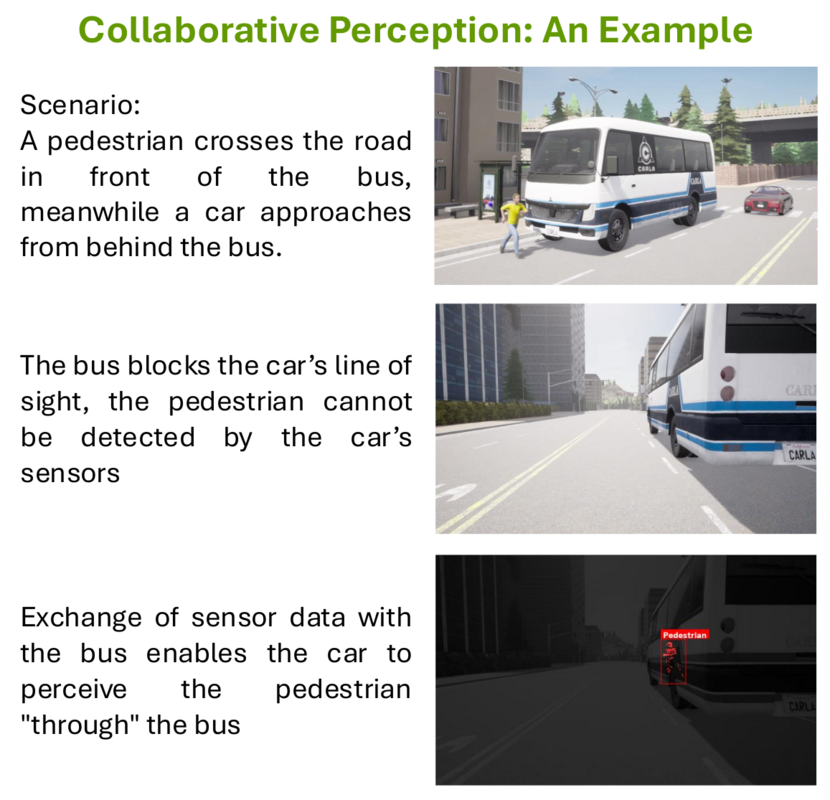
Kollaborative Umgebungswahrnehmung basiert auf dem Austausch von Umgebungsdaten zwischen vernetzten Verkehrsteilnehmern, beispielsweise in Form von Sensordaten oder Listen erkannter Objekte. Ein (teil-)automatisiertes Fahrzeug kann mithilfe von Daten anderer Fahrzeuge beispielsweise Objekte erkennen, die für die eigenen Sensoren durch Gebäude oder andere Verkehrsteilnehmer verdeckt sind. So kann in Gefahrsituationen frühzeitig reagiert werden, um die Sicherheit im Straßenverkehr weiter zu verbessern. Zukünftige Mobilfunkgenerationen sollen derartige Konzepte durch die direkte Kommunikation zwischen Fahrzeugen auch in Bereichen mit wenig ausgebautem Mobilfunknetz ermöglichen.
Im Projekt werden daher verschiedene Ansätze auf ihre Anforderungen an die Kommunikation untersucht und hinsichtlich ihrer Eignung für unterschiedliche Verkehrs- und Netzwerksituationen evaluiert. Zudem werden neue Strategien und Protokolle für die Fusion und den Austausch der Daten entwickelt.
Mit dem Aufkommen vollautomatisierter Fahrzeuge gewinnt auch das teleoperative Fahren an Relevanz. In Situationen, in denen das Fahrzeug allein nicht mehr weiterkommt, etwa an Unfallstellen, wird die Kontrolle an eine Leitstelle übergeben. Dort steuert ein Mensch das automatisierte Fahrzeug aus der Ferne. Um der Leitstelle ein umfangreiches Bild der Situation zu ermöglichen, müssen verschiedene Daten übertragen und dargestellt werden.

Hierzu zählen eine lückenlose Kombination aus hochauflösenden Videostreams der Fahrzeugumgebung, präzisen Fahrzeug- und Telemetriedaten (wie Geschwindigkeit, Lenkwinkel und GPS-Position) sowie Audio- und Umweltsignalen, welche in Echtzeit an einen im Projekt entwickelten Teleoperationsstand übertragen werden, der dem Operator die Situation zudem über haptisches Feedback fühlbar macht.
Das Projekt wird vom Bundesministerium für Forschung, Technologie und Raumfahrt
(BMFTR) unter der Fördernummer 16KIS2412 finanziert.
Weitere Informationen sind unter https://6gem.de zu finden.