
AMP - Advanced Motion Planning
Motivation
Die Entwicklung von Komponenten für hochautomatisierte Fahrfunktionen ist derzeit von großem wirtschaftlichem, wissenschaftlichem und politischem Interesse. Automatisiertes Fahren ist nicht nur eine Komfortfunktion, sondern hat auch das Potenzial, den Straßenverkehr langfristig sicherer und effizienter zu machen.
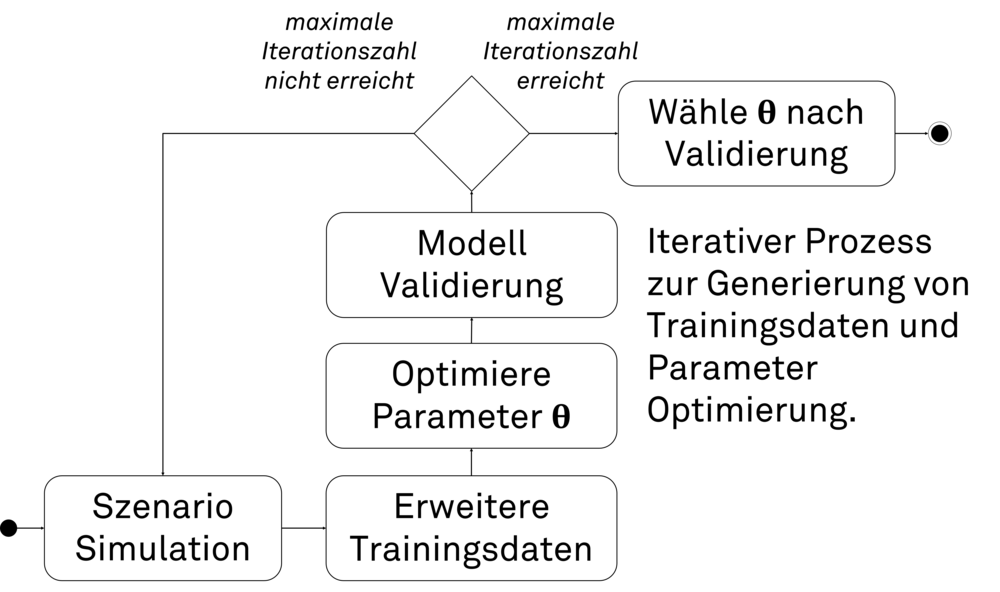
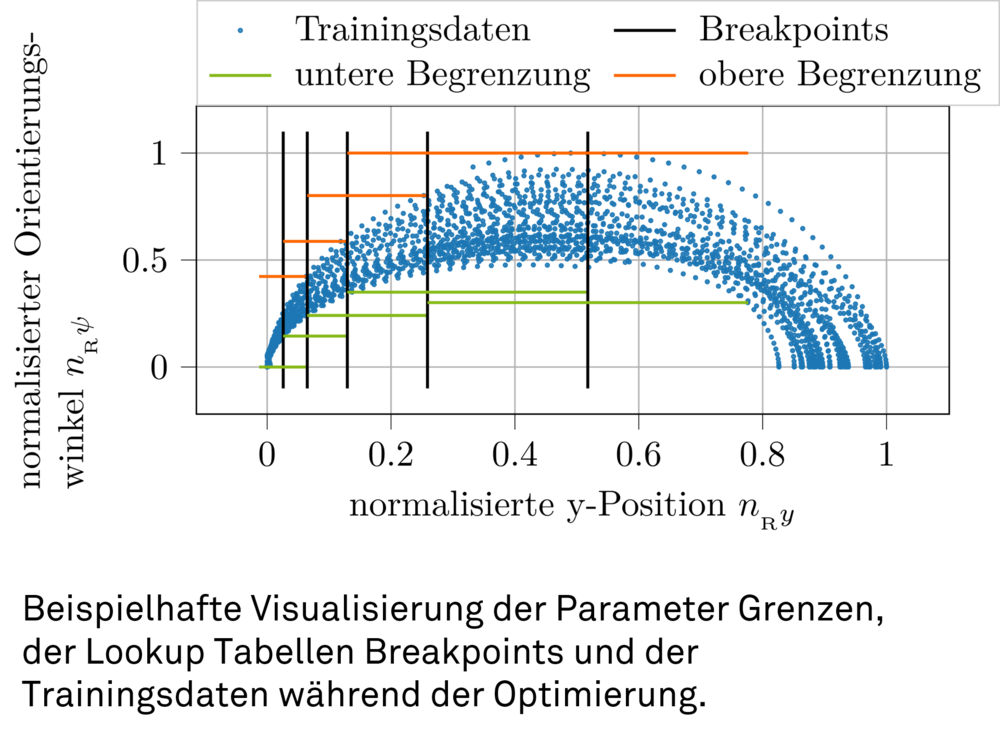
Das Problem des automatisierten Fahrens wird häufig in Teilprobleme unterteilt. Ein solches Teilproblem besteht darin, die optimale Trajektorie für die gegebene Szene zu finden. Viele Ansätze stützen sich auf eine optimierungsbasierte Planungsstrategie. Trotz der Verfügbarkeit effizienter Heuristiken und Optimierungsalgorithmen erfordert eine Anwendung auf serientypischen Automobilsteuergeräten im Allgemeinen eine Vereinfachung der Problemformulierung, um die Laufzeitanforderungen zu erfüllen. Dies hat eine Verkleinerung des Lösungsraumes zur Folge, der zu einer suboptimalen Trajektorie führen kann, und motiviert daher eine auf expliziten Funktionen basierende Trajektoriengenerierung. Die Parameter der Funktionen sind in Lookup Tabellen angeordnet, sodass ein menschlicher Experte ihren Einfluss auf die Ausgangstrajektorie nachvollziehen kann.
Referenzplaner und Fahrkomfort
Ein zeitoptimaler Trajektorienplaner soll als Referenz dienen, der Beispieltrajektorien liefert, um die Parameter nun optimal zu wählen. Es ist jedoch nicht bekannt, ob die resultierenden Trajektorien von den Fahrgästen als komfortabel empfunden werden. Bei Spurwechselmanövern sind beispielsweise der Zeitpunkt und die absoluten Werte der Querbeschleunigung und des Querrucks wesentliche Größen für den empfundenen Komfort.
In vielen Fällen wird der Komfort während einer Testfahrt bewertet, was sehr zeitaufwändig sein kann. Daher ist es vorteilhaft, die optimalen Parameter vor der Anwendung in einem Testfahrzeug nach objektiven Kriterien zu bewerten.
Zielsetzung
Im Rahmen des Projekts soll ein Framework entwickelt werden, das die Parameter eines Trajektorienplaners optimal wählt. Die optimalen Parameter sollen mit hoher Wahrscheinlichkeit auf komfortable Spurwechseltrajektorien führen, sodass der Aufwand zur Anpassung der Parameter im Testfahrzeug reduziert wird.
Kontakt
Philip Dorpmüller