Timed Elastic Band Online Trajektorienoptimierung
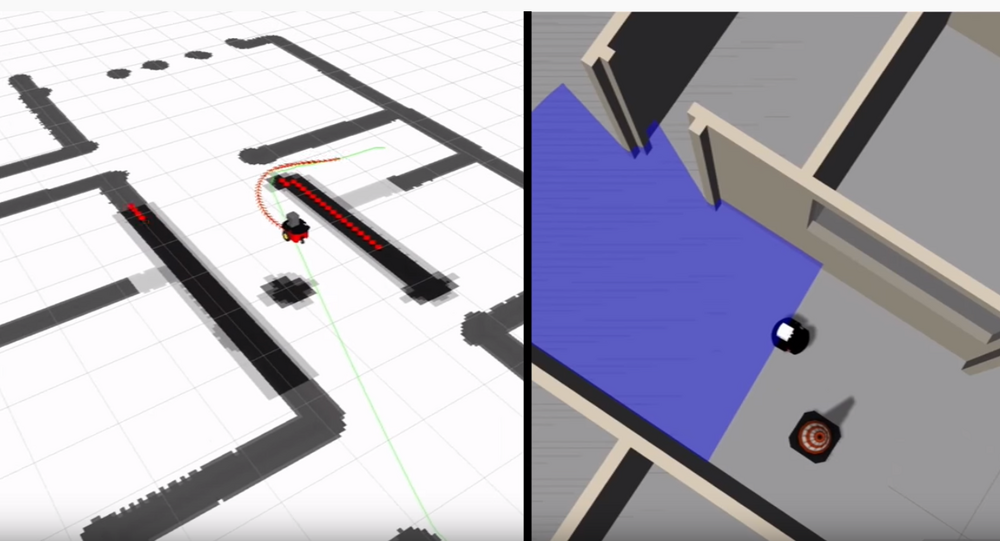
Der teb_local_planner wurde von Christoph Rösmann am Lehrstuhl RST entwickelt und implementiert ein Plugin für den base_local_planner des ROS Navigationsstacks. Die zugrunde liegende Methode "timed elastic band" (Zitate 1+2) optimiert zur Laufzeit die lokale Trajektorie des mobilen Roboters in Bezug auf die Ausführungszeit, die Vermeidung von Hindernissen unter Berücksichtigung der kinodynamischen Einschränkungen. Der teb_local_planner eignet sich für sowohl für Roboter mit Differentialantrieb als auch Ackermannkinematiken (car like robots). In Benchmarks erweist sich der TEB hinsichtlich Robustheit, Hindernisvermeidung, Pfadlänge und Fahrzeit gegenüber anderen lokalen Onlinetrajektorienplanern als überlegen (Zitat 3)
Zitate:
1. C. Rösmann, W. Feiten, T. Wösch, F. Hoffmann and T. Bertram: Trajectory modification considering dynamic constraints of autonomous robots. Proc. 7th German Conference on Robotics, Germany, Munich, 2012, pp 74–79.
2. C. Rösmann, W. Feiten, T. Wösch, F. Hoffmann and T. Bertram: Efficient trajectory optimization using a sparse model. Proc. IEEE European Conference on Mobile Robots, Spain, Barcelona, 2013, pp. 138–143.
3. Alexandros Filotheou, Emmanouil Tsardoulias, Antonis Dimitriou Andreas Symeonidis, Loukas Petrou,
Quantitative and Qualitative Evaluation of ROS-Enabled Local and Global Planners in 2D Static Environments
Journal of Intelligent & Robotic Systems, 2019, pp. 1-35