![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
Development of situation analysis modules for automated vehicles in virtual environment
Motivation and goals
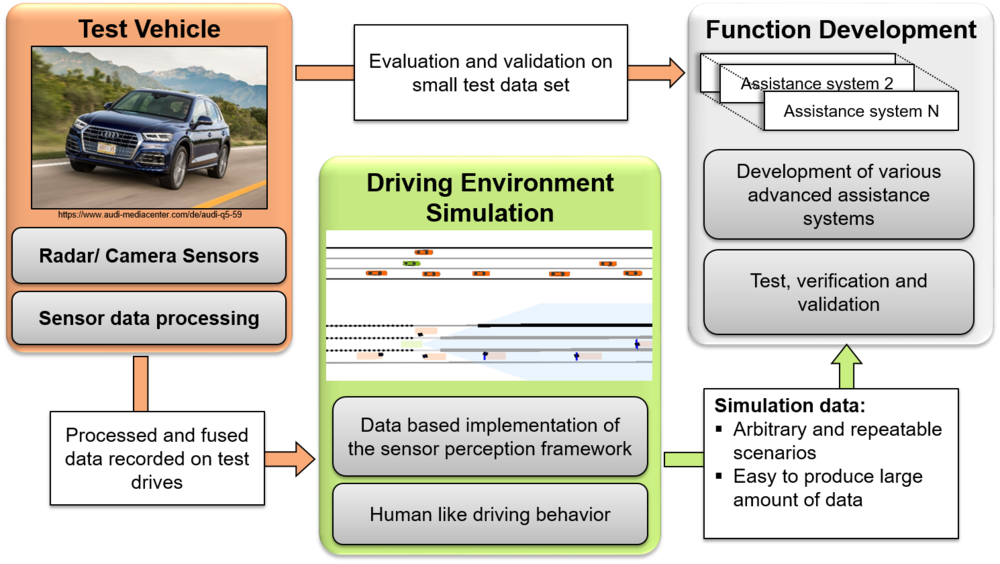
For future automated driving functions, a complete understanding of the current driving situation and its future evolution is essential. However, arbitrarily complex situations can arise in road traffic that cannot be described with a limited set of rules. In order to test algorithms in as many situations as possible, a simulation environment is needed that realistically represents both the characteristics of the sensors and the driving behavior of other road users. The developed simulation environment will then be used to develop different modules for situation analysis. In a first step, the structured environment on highways is exploited to assign a maneuver class to each vehicle. A distinction can be made between the basic maneuvers lane change and lane keeping, from which all more complex maneuvers can be composed. In order to use temporal information in addition to the actual maneuver class, the remaining time until crossing the lane marking is estimated. On this basis, the distribution of possible future trajectories of all road users can be calculated. As an extension, interactions between the individual participants can be explicitly modeled as well.
Driver Modeling
The simulation uses an individually parameterized Intelligent Driver Model and a probabilistic lane change model to generate human driving behavior of the simulation vehicles. In addition to maneuver selection, its execution is also modeled stochastically. For this purpose, the actual maneuver is overlaid with a sample of a Gaussian process. The parameters of the Gaussian process describe the expression as well as the frequency of the deviations and can be learned from recorded examples from road traffic.
Sensor modeling
Autonomous vehicles use different sensors to perceive the environment. The information from all sensors is fused into a global representation in a subsequent step. Individual sensors are not of interest for the development of situation analysis functions. Therefore, a data-based representation of the uncertainties for the whole perception chain is performed. Here, the uncertainty depends on the current state of the object, the tracking time, and a random term. In addition, other sensor-specific effects are modeled.
Maneuver classification
The goal of maneuver classification is to determine the most likely maneuver from a set of maneuvers for other road users based on different features. On the one hand, object-based features are used, which describe the movement of the observed vehicle within the lane, and on the other hand, situation-based features are used, which represent the current traffic situation. All features can be measured with current automotive sensors. For the classification a Multiclass Support Vector Machine approach is chosen, which is trained in the One-vs-One method.
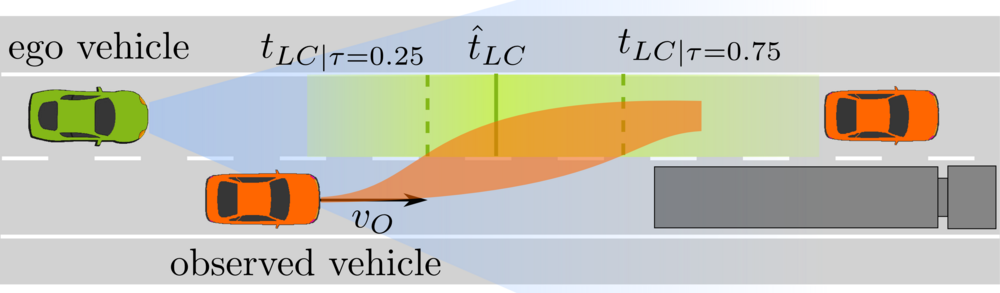
Time-To-Lane-Change Prediction
In addition to the predicted maneuver, the timing of a lane change is of great interest to automated systems. Since the estimation of the timing is subject to many uncertainties (e.g., human behavior), the probability density distribution of the lane change timing is estimated. The estimation is performed based on similar features as in maneuver classification using a quantile regression forest. Here, the distribution is approximated by an arbitrary number of quantiles. The best point estimate here is the median.
Maneuver-based trajectory prediction
Besides the current maneuver, the future trajectory of other road users is of great interest. Due to uncertainties, the prediction of a single trajectory is not sufficient, but the total probability density of the future states is required. This depends on the state and the environment on the one hand and on the current maneuver on the other hand. For prediction, a mixture of experts approach is used in which the maneuver probabilities are used as gating functions. The maneuver-specific trajectories can be represented, for example, by Gaussian Mixture Models.
Interaction-aware trajectory prediction
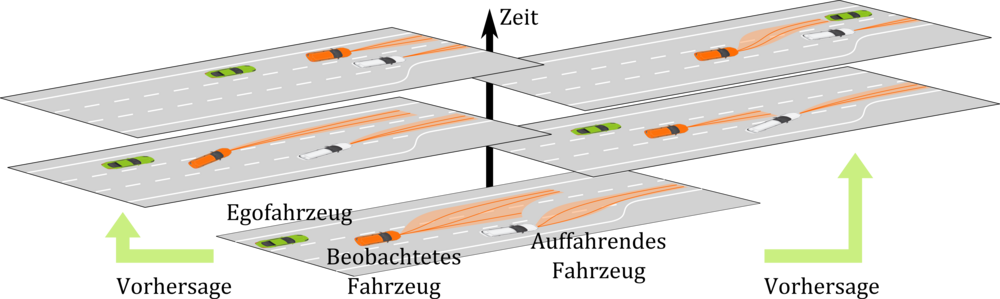
Maneuver-based trajectory prediction neglects the interaction between individual vehicles in the current driving situation. However, especially in merging scenarios these interdependencies are of great importance. Therefore, an interaction-aware trajectory prediction will be performed in a further step.
The project is carried out in cooperation with the ZF Group.