![[Translate to English:]](/storages/rst-etit/_processed_/e/8/csm_Technologie_RST_2018_339_4acb56a732.jpg "[Translate to English:]")
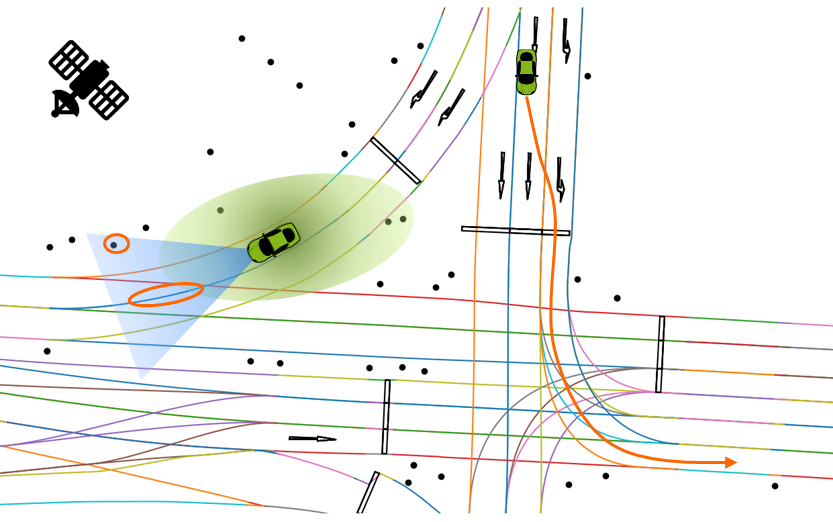
ELM - Ego Localization and Mapping
High-precision maps provide essential information for automated vehicles. In addition to enabling lane-accurate route planning, the HD map acts as an additional predictive sensor once the vehicle has localized itself on the map. Since GPS alone is too inaccurate for lane-accurate localization, the vehicle's exteroceptive sensors (camera, radar and lidar) are used to help determine its position. The challenge is to use these sensors to detect landmarks referenced in the HD map and thus infer the position of the vehicle in the HD map. Furthermore, due to the high level of detail of the map, a memory-efficient representation of the map objects is of great significance to enable real-time capable applications in the vehicle. The ELM project also addresses the question of how the HD map can be used to extend the environment model after localization and how inconsistencies between the environment model and the HD map due to outdated map data can be detected and updated.