![[Translate to English:]](/storages/zentraler_bilderpool/_processed_/8/b/csm_Kopfbild_Orga_Luftbild_ff7b216729.jpg "[Translate to English:]")
Conference Automated Driving 2022
The conference Automated Driving 2022 took place the week before last.
The RST was represented with a contribution on the interpretable approximation…

Call for Paper for the 17th DortmunderAutoTag
On 08 September 2022, the successful series of events of the DortmunderAutoTag will be continued.
This specialist conference, which is already taking…
Registrieren Sie sich jetzt für die Fachtagung VDI Mechatronik 2022
Registrieren Sie sich jetzt für die spannende Fachtagung VDI Mechatronik 2022 . Das interessante und abwechslungsreiche Programm der Fachtagung VDI…

New real-time kinematic differential global navigation satellite system
We recently upgraded our test vehicle with a new real-time kinematic differential global navigation satellite system (RTK-DGNSS).
The GeneSys ADMA-G…

Informationsvideo zum internationalen Studiengang Automatition & Robotics
Das Informationsvideo zum internationalen Studiengang Automatition & Robotics entstand unter Mitwirkung des Lehrstuhls RST.

Best Paper Award at NeurIPS Workshop
Our contribution "UMBRELLA: Uncertainty-Aware Model-Based Offline Reinforcement Learning Leveraging Planning" achieved the best paper award at the…

Projektwebseite zum Forschungsprojekt KISSaF ist online
Beim automatisierten Fahren des SAE-Levels 3 muss die sichere Fahrzeugführung bis zur Übernahme der Fahraufgabe durch den Fahrer gewährleistet…

Traditionelles Weihnachtsvideo
Wie schon in den vergangenen Jahren präsentiert der Lehrstuhl RST auch 2021 wieder ein neues Weihnachtsvideo.
Wir wünschen auf diesem Wege allen ein…

Deep Learning Cluster wird in Betrieb genommen
Unser Grafikcluster für den Bereich Deep Learning nimmt den Betrieb auf.
Das Cluster verfügt über vier NVIDIA GeForce RTX 3090 Grafikkarten mit je 24…

Neues Forschungsprojekt DEmandäR
Datenbasierte Empfehlungen für das automatisierte Fahren in der ländlichen Region
Ein ÖPNV mit automatisierten Verkehrsmitteln kann zukünftig auf dem…

Efficient Localization on Highways Employing Public HD Maps and Series-Production Sensors
Im Vergleich zu Standard-Navigationskarten enthalten HD-Karten präzise Zusatzinformationen für automatisierte Fahrzeuge. Um diese Informationen nutzen…

Extending skeleton tracking for pedestrian activity recognition by object detection for filtering erroneous estimates
Pedestrians are the weakest road users. Despite technological development, the number of pedestrians injured and killed has remained almost constant…

Wizard-of-Oz Studie zum Automatisierten Fahren
Der Lehrstuhl RST hat im Rahmen einer Wizard-of-Oz Studie das Verhalten und die motorischen, sensorischen und physiologischen Reaktionen von Fahrern…

Iformational video for international students
Today, filming took place in the IRF robotics lab for an informational video about the bachelor's degree program in ET for international students.
A…

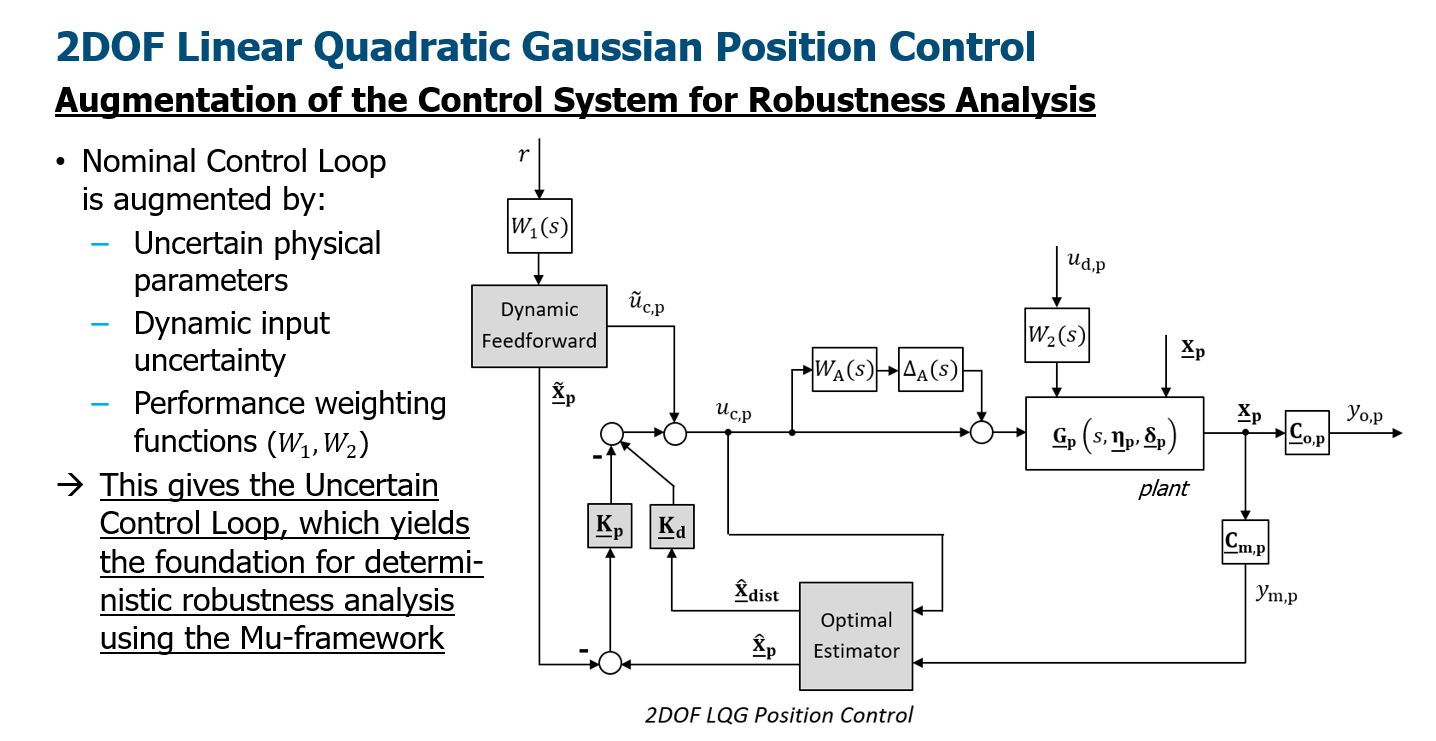
Robustness Analysis of a 2-Degrees of Freedom Linear Quadratic Gaussian Position Control (2DOF LQG Control) of the Front Axle Actuator for a Steer-by-Wire Steering System
The Steer-by-Wire (SbW) steering system is a key technology for highly automated driving. For automated lateral vehicle guidance, the precise position…
Gratulation an Herrn Oeljeklaus
Wir gratulieren Herrn Oeljeklaus zu seiner erfolgreich abgeschlossenen Promotion „An Integrated Approach for Traffic Scene Understanding from…

Comparison of Real and Simulation Data on Lane Change Prediction for Highway Driving
To disburden human drivers in certain driving scenes by taking over the driving task (SAE level 2 to 4) or to release him entirely from driving (SAE…

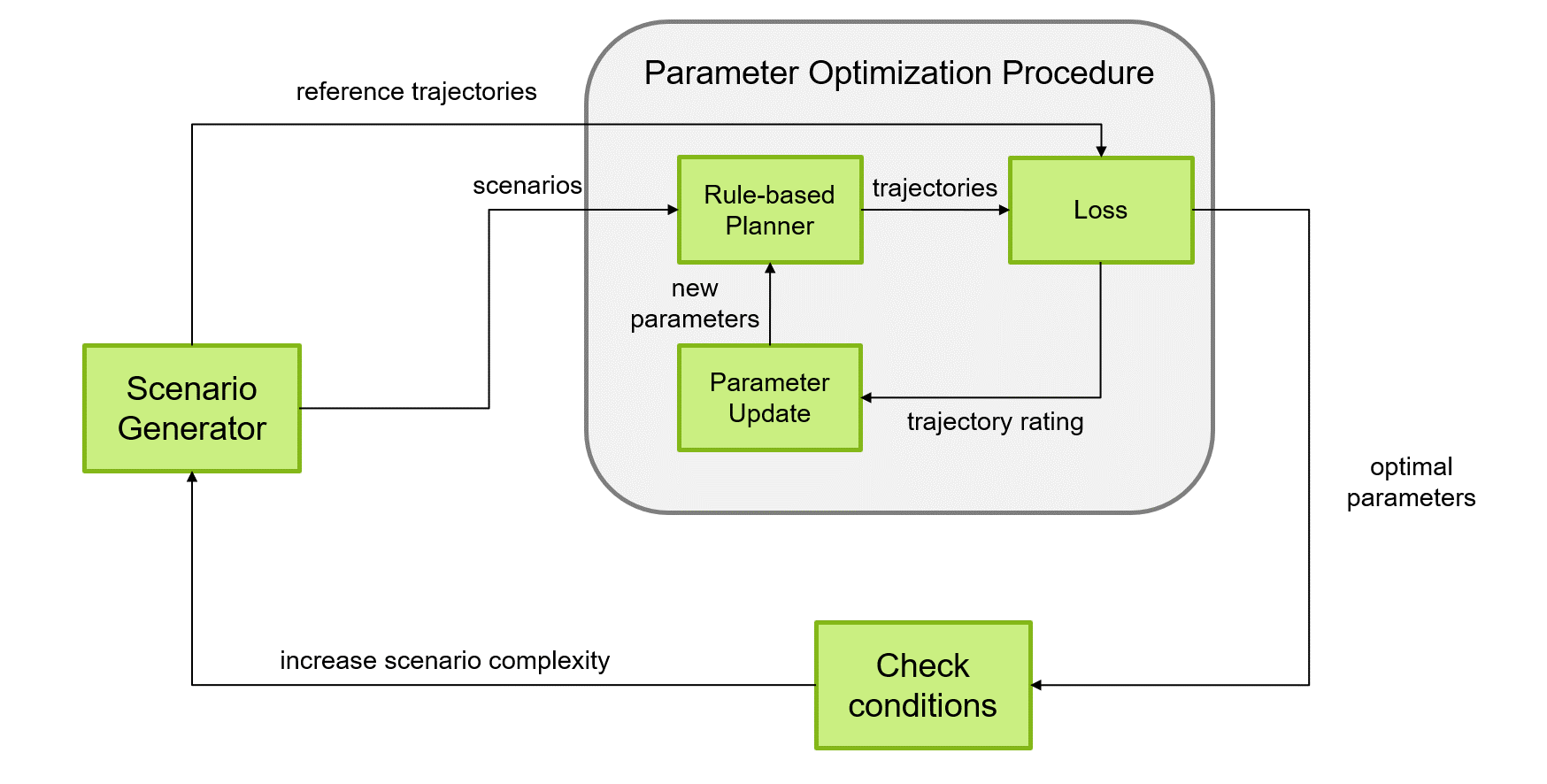
Driving Policy Optimization
A safe and comfortable trajectory of an automated vehicle can be described implicitly by a trajectory optimization problem. Unfortunately, the…
Body pose estimation for activity and intention estimation of pedestrians
While the number of people injured and killed in road traffic inside the vehicle is decreasing every year due to technological developments in driver…

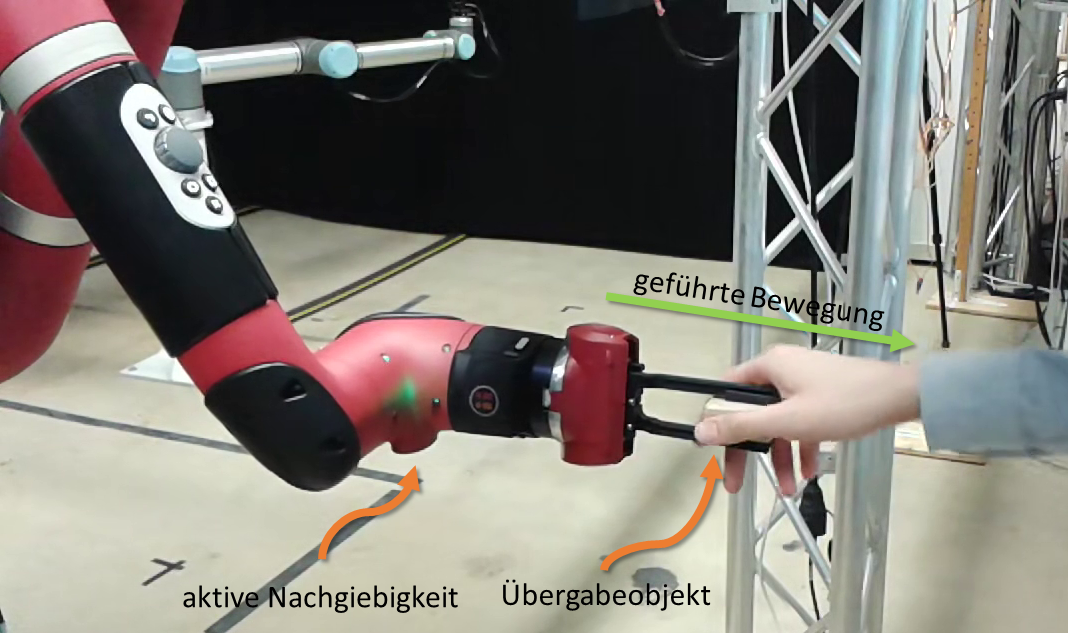
Aktive Nachgiebigkeit zur Verbesserung der physikalischen Mensch-Roboter Interaktion
Die Übergabe eines Objekts ist für Menschen ein alltäglicher und unterbewusster Vorgang.
Wir koordinieren unsere Bewegungen instinktiv und definieren…
Examination of the reference trajectory for compliance with the current driving dynamics state
The reference trajectory for automated driving functions is usually determined using planning algorithms based on simplifying assumptions about…
