![[Translate to English:]](/storages/rst-etit/_processed_/4/d/csm_Autotag_3385_05cb28b1ba.jpg "[Translate to English:]")
Vehicle localization on HD maps for the @CITY project
Summary
Automated driving in the city and especially at urban intersections can be realized by means of high definition maps. However, the use of such HD maps is only possible if the position and orientation of the vehicle with respect to the map are known. This localization problem is being addressed by ZF as part of the @CITY research project. The OpenDrive HD maps which were created by partners as part of the project are parsed and pre-processed. Landmarks which are necessary for localization, such as lane markings or pillars of road signs and traffic lights, are extracted from the map and compared with the sensor data of the vehicle. Thereby, camera, radar and lidar sensors are used, which are close to what is installed in current series production vehicles. A sequential Monte Carlo method, also known as particle filter, is used for localization.
1. Kartenerstellung und Verarbeitung
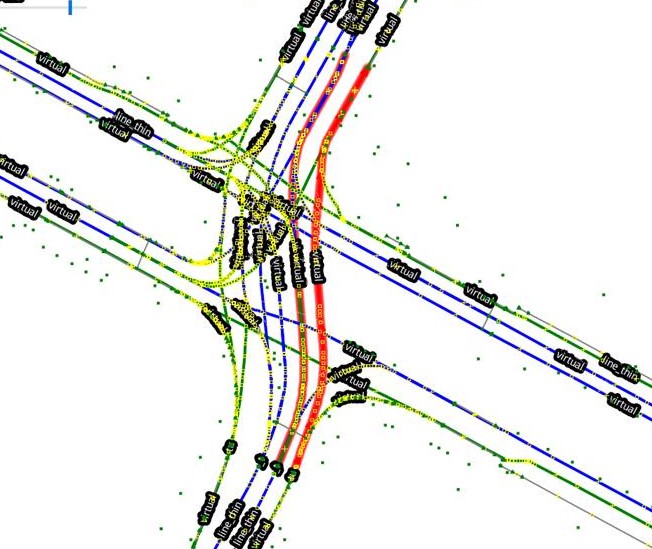
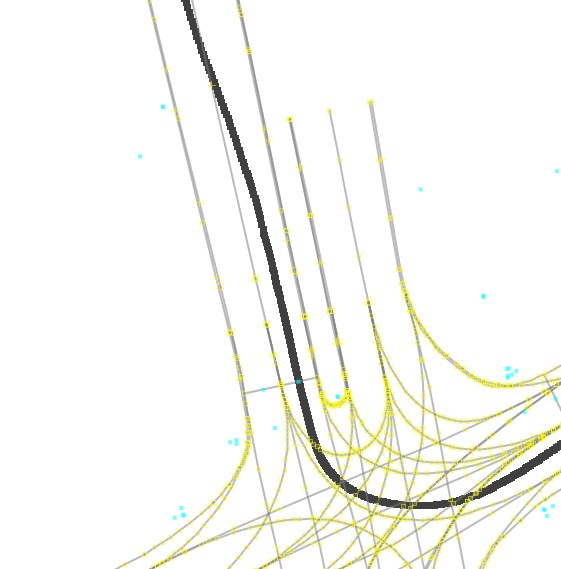
Im Rahmen des @CITY Projekts [1] wurden HD-Karten mit hochgenauer Sensorik erstellt und ZF im OpenDrive- Format [2] zur Verfügung gestellt. Ein erster Arbeitsschritt für ZF Automotive ist es diese Karten zu parsen und auf eine an das Konzept von Lanelet2 [3] angelehnte Datenstruktur abzubilden. Der Vorteil des Lanelet2 Formats besteht einerseits in der weniger hierarchischen Strukturierung der Kartentopologie. Andererseits ermöglicht die Darstellung der Kartengeometrie durch Punkte und Polylinien den Einsatz von einfachen und mächtigen Methoden der Algorithmischen Geometrie. Der Speicherbedarf von Polylinien ist ähnlich zu dem von den parametrischen Kurven, die in der zugrunde liegenden OpenDrive Karte verwendet werden [4].
2. Lokalisierung
Bei der Lokalisierung wird die Fahrzeugpose, also die Position und Orientierung des Fahrzeugs in der Karte geschätzt. Während die Karte mit Hochpräzisions-Sensoren erstellt wurde, die mehr Wert sind als ein handelsüblicher PKW, erfolgt die Lokalisierung von ZF mit Hilfe von seriennahen Sensoren. Dies steht im Gegensatz zu typischen Studien aus der Literatur [5,6], bei denen dieselben Sensoren für die Erstellung der Karte und für die Lokalisierung verwendet werden. Die Lokalisierung in urbanem Gebiet und insbesondere auf Kreuzungen ist aufgrund der oft schlechten oder nicht vorhandenen Spurmarkierungen und der geringen GPS - Signalqualität herausfordernd [5]. Wichtige Landmarken sind hier Pfeiler von Straßenschildern und Ampeln, die mit Radar- und Lidarsensoren detektiert werden. Zur Lokalisierung wird eine sequenzielle Monte-Carlo- Methode, auch bekannt als Partikelfilter [7], verwendet. Die Wahrscheinlichkeitsverteilung der Fahrzeugpose wird hierbei als eine Menge von Partikeln dargestellt. Jedes Partikel stellt eine mögliche Pose dar und hat ein Gewicht, welches den Einfluss auf die Wahrscheinlichkeitsverteilung festlegt. Um das Gewicht eines Partikels zu bestimmen, werden Messmodelle verwendet. Ein Messmodell berechnet die Wahrscheinlichkeit für eine Fahrzeugpose, indem es die Vereinbarkeit der Sensordaten mit der HD-Karte quantifiziert. Eine besondere Herausforderung ist es hier die durch die Sensoren erfassten Objekte den Landmarken in der Karte zuzuordnen [8]. Eine solche Assoziation ist nicht immer eindeutig möglich. Einerseits wird dieses Problem durch den Partikelfilter handhabbar, da verschiedene Partikel verschiedene Assoziationen verfolgen können. Andererseits können geometrische Strukturen aus den Kartenlandmarken mit den geometrischen Strukturen aus den detektierten Landmarken abgeglichen werden. Empirisch wird gefunden, dass ein solcher Pattern- Matching-Algorithmus die Robustheit der Lokalisierung signifikant erhöht.
3. Danksagung
Die vorliegende Arbeit ist ein Ergebnis des Verbundforschungsprojektes @CITY – Automated Cars and Intelligent Traffic in the City. Das Forschungsvorhaben wird vom Bundesministerium für Wirtschaft und Energie (BMWi) aufgrund eines Beschlusses des Deutschen Bundestages gefördert. Die Verantwortung für den Inhalt dieser Veröffentlichung trägt allein der Verfasser.
4. Literatur
[1] www.atcity-online.de
[2] www.opendrive.org
[3] Poggenhans, Fabian, et al. "Lanelet2: A highdefinition map framework for the future of automated driving." 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018.
[4] Stannartz, Niklas, et al. "Comparison of curve representations for memory-efficient and high-precision map generation." 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020.
[5] Tao, Zui, et al. "Mapping and localization using GPS, lane markings and proprioceptive sensors." 2013
IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2013.
[6] Levinson, Jesse, and Sebastian Thrun. "Robust vehicle localization in urban environments using probabilistic maps." 2010 IEEE international conference on robotics and automation. IEEE, 2010.
[7] Thrun, Sebastian. "Probabilistic robotics." Communications of the ACM 45.3 (2002): 52-57.
[8] Hofstetter, Isabell, et al. "Reliable data association for feature-based vehicle localization using geometric hashing methods." 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020.
Mario Theers, KedarThale, Jason Devanesan
ZF Automotive Germany GmbH, Automated Driving and Integral Cognitive Safety, Düsseldorf, Germany
Marc Sons
ZF Automotive Germany GmbH, Automated Driving and Integral Cognitive Safety, Gelsenkirchen, Germany